Penggerak listrik variabel sebagai sarana penghematan energi
 Transisi dari penggerak listrik yang tidak diatur ke penggerak listrik yang diatur adalah salah satu cara utama untuk menghemat energi dalam penggerak listrik dan di bidang teknologi melalui penggerak listrik.
Transisi dari penggerak listrik yang tidak diatur ke penggerak listrik yang diatur adalah salah satu cara utama untuk menghemat energi dalam penggerak listrik dan di bidang teknologi melalui penggerak listrik.
Biasanya, kebutuhan untuk mengontrol kecepatan atau torsi penggerak listrik dari mekanisme produksi ditentukan oleh persyaratan proses teknologi. Misalnya, laju umpan pemotong menentukan kebersihan pemrosesan benda kerja pada mesin bubut, pengurangan kecepatan elevator diperlukan untuk penentuan posisi mobil yang akurat sebelum berhenti, kebutuhan untuk menyesuaikan torsi poros belitan ditentukan oleh kondisi untuk mempertahankan gaya tegangan yang konstan dari bahan yang terluka, dll.
Namun, ada sejumlah mekanisme yang tidak memerlukan perubahan kecepatan sesuai dengan kondisi teknologi, atau metode (non-listrik) lain yang memengaruhi parameter proses teknologi digunakan untuk pengaturan.
Pertama-tama, mereka termasuk mekanisme pengangkutan berkelanjutan untuk memindahkan produk padat, cair dan gas: konveyor, kipas, kipas, unit pompa. Untuk mekanisme ini, saat ini, sebagai aturan, penggerak listrik asinkron yang tidak diatur digunakan, yang menggerakkan benda kerja pada kecepatan konstan, terlepas dari beban pada mekanisme. Di bawah beban parsialnya, mode operasi pada kecepatan konstan ditandai dengan peningkatan konsumsi energi tertentu dibandingkan dengan modus nominal.
Pengurangan kinerja NSC, efisiensi konveyor menurun, karena bagian relatif dari daya yang dikonsumsi mengatasi momen diam. Lebih ekonomis adalah mode kecepatan variabel, yang memberikan kinerja yang sama, tetapi dengan komponen tenaga tarikan yang konstan.
Dalam gambar. 1 menunjukkan ketergantungan daya poros motor untuk konveyor dengan momen idle Mx = 0, ЗМв untuk kecepatan pergerakan beban yang konstan (v — const) dan dapat disesuaikan (Fg = const). Area yang diarsir pada gambar menunjukkan penghematan energi yang diperoleh dengan kontrol kecepatan.
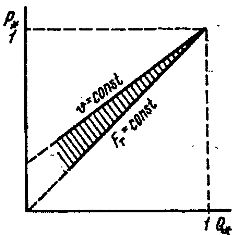
Beras. 1. Ketergantungan kekuatan poros motor listrik pada kinerja konveyor
Jadi jika kecepatan konveyor diturunkan menjadi 60% dari nilai nominalnya, maka daya poros motor akan berkurang sebesar 10% dibandingkan dengan nilai nominalnya. Efek pengaturan kecepatan semakin tinggi, semakin besar torsi idle, dan semakin signifikan mengurangi kinerja konveyor.
Mengurangi kecepatan mekanisme transportasi berkelanjutan dengan underloading memungkinkan Anda untuk melakukan jumlah pekerjaan yang diperlukan dengan konsumsi energi spesifik yang lebih rendah, mis. untuk menyelesaikan masalah ekonomi murni dalam mengurangi konsumsi energi dalam proses teknologi pemindahan produk.
Biasanya, dengan pengurangan kecepatan mekanisme semacam itu, efek ekonomi juga muncul karena peningkatan karakteristik operasional peralatan teknologi. Jadi, ketika kecepatan berkurang, keausan badan konveyor berkurang, masa pakai pipa dan perlengkapan meningkat karena penurunan tekanan yang dikembangkan oleh mesin untuk memasok cairan dan gas, dan konsumsi berlebih dari produk ini juga dihilangkan.
Efek di bidang teknologi seringkali ternyata jauh lebih tinggi daripada karena penghematan energi, oleh karena itu pada dasarnya salah untuk memutuskan kelayakan menggunakan penggerak listrik terkontrol untuk mekanisme seperti itu dengan mengevaluasi hanya aspek energi.
Kontrol kecepatan mesin sekop.
Mekanisme sentrifugal untuk pasokan cairan dan gas (kipas, pompa, kipas, kompresor) adalah mekanisme industri umum utama dengan potensi terbesar di seluruh negeri untuk secara signifikan mengurangi konsumsi energi spesifik. Posisi khusus mekanisme sentrifugal dijelaskan oleh sifat masifnya, daya tinggi, sebagai aturan, dengan mode operasi yang lama.
Keadaan ini menentukan bagian yang signifikan dari mekanisme ini dalam neraca energi negara.Total kapasitas terpasang motor penggerak untuk pompa, kipas dan kompresor adalah sekitar 20% dari kapasitas semua pembangkit listrik, sementara kipas saja mengkonsumsi sekitar 10% dari seluruh listrik yang diproduksi di negara ini.
Sifat operasi dari mekanisme sentrifugal disajikan dalam bentuk ketergantungan head H pada laju aliran Q dan daya P pada laju aliran Q. Dalam mode operasi stasioner, head yang diciptakan oleh mekanisme sentrifugal diimbangi oleh tekanan jaringan hidro atau aerodinamis di mana ia memberikan cairan atau gas.
Komponen statis dari tekanan ditentukan untuk pompa — oleh perbedaan geodesik antara level pengguna dan pompa; untuk penggemar — atraksi alam; untuk kipas dan kompresor - dari tekanan gas terkompresi di jaringan (reservoir).
Titik persimpangan karakteristik Q-H-pompa dan jaringan menentukan parameter H-Hn dan Q-Qn. Pengaturan laju aliran Q pompa yang beroperasi pada kecepatan konstan biasanya dilakukan oleh katup di outlet dan menyebabkan perubahan karakteristik jaringan, akibatnya laju aliran QA * <1 sesuai dengan titik perpotongan dengan karakteristik pompa.
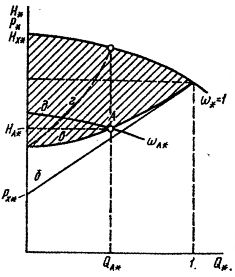
Beras. 2. Q-H-karakteristik unit pemompaan
Dengan analogi rangkaian listrik, mengatur aliran melalui katup mirip dengan mengendalikan arus dengan meningkatkan hambatan listrik rangkaian. Jelas, metode kontrol ini tidak efisien dari sudut pandang energi, karena disertai dengan kehilangan energi yang tidak produktif pada elemen pengatur (resistor, katup). Kehilangan katup ditandai dengan area yang diarsir pada Gambar. 1.
Seperti pada rangkaian listrik, lebih ekonomis untuk mengatur sumber energi daripada penggunanya. Dalam hal ini, arus beban berkurang pada rangkaian listrik karena penurunan tegangan sumber. Dalam jaringan hidrolik dan aerodinamis, efek serupa diperoleh dengan mengurangi tekanan yang diciptakan oleh mekanisme tersebut, yang diwujudkan dengan mengurangi kecepatan impelernya.
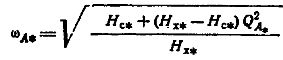
Ketika kecepatan berubah, karakteristik operasi mekanisme sentrifugal berubah sesuai dengan hukum kesamaan, yang berbentuk: Q * = ω *, H * = ω *2, P * = ω *3
Kecepatan impeler pompa di mana karakteristiknya akan melewati titik A:
Ekspresi untuk daya yang dikonsumsi oleh pompa selama pengaturan kecepatan adalah:

Ketergantungan kuadrat momen pada kecepatan merupakan karakteristik terutama untuk kipas, karena komponen statis kepala yang ditentukan oleh gaya dorong alami jauh lebih kecil daripada Hx. Dalam literatur teknis, kadang-kadang digunakan perkiraan ketergantungan momen pada kecepatan, yang mempertimbangkan sifat mekanisme sentrifugal ini:
M* = ω *n
di mana n = 2 di pada Hc = 0 dan nHc> 0. Perhitungan dan eksperimen menunjukkan bahwa n=2 — 5, dan nilainya yang besar adalah karakteristik kompresor yang beroperasi di jaringan dengan tekanan balik yang signifikan.
Analisis mode operasi pompa pada kecepatan konstan dan variabel menunjukkan bahwa konsumsi energi berlebih pada ω= const ternyata sangat signifikan. Misalnya, hasil perhitungan mode operasi pompa dengan parameter ditunjukkan di bawah Hx * = 1,2; Px*= 0,3 pada jaringan dengan tekanan balik berbeda Зс:
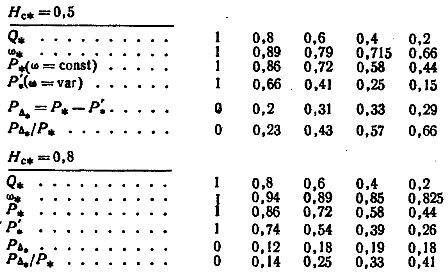
Data yang diberikan menunjukkan bahwa penggerak listrik yang dikendalikan dapat secara signifikan mengurangi konsumsi listrik yang dikonsumsi: hingga 66% pada kasus pertama dan hingga 41% pada kasus kedua. Dalam praktiknya, efek ini bisa menjadi lebih tinggi, karena karena berbagai alasan (tidak adanya atau tidak berfungsinya katup, penggerak manual), pengaturan oleh katup tidak diterapkan sama sekali, yang tidak hanya menyebabkan peningkatan konsumsi listrik, tetapi juga upaya dan biaya yang berlebihan dalam jaringan hidrolik.
Masalah energi mekanisme sentrifugal kerja tunggal dalam jaringan dengan parameter konstan telah dibahas di atas. Dalam praktiknya, ada operasi paralel dari mekanisme sentrifugal dan jaringan seringkali memiliki parameter variabel. Misalnya, hambatan aerodinamis jaringan tambang berubah dengan perubahan panjang dinding, hambatan hidrodinamik jaringan pasokan air ditentukan oleh mode konsumsi air, yang berubah pada siang hari, dll.
Dengan operasi paralel mekanisme sentrifugal, dua kasus dimungkinkan:
1) kecepatan semua mekanisme diatur secara bersamaan dan serempak;
2) kecepatan satu mekanisme atau bagian dari mekanisme diatur.
Jika parameter jaringan konstan, maka dalam kasus pertama semua mekanisme dapat dianggap sebagai satu ekuivalen yang semua relasi di atas valid. Dalam kasus kedua, tekanan bagian mekanisme yang tidak diatur memiliki efek yang sama pada bagian yang diatur seperti tekanan balik dan sangat signifikan, oleh karena itu penghematan listrik di sini tidak melebihi 10-15% dari daya nominal. dari mesin.
Parameter jaringan variabel sangat mempersulit analisis kerjasama mekanisme sentrifugal dengan jaringan. Dalam hal ini, efisiensi energi dari penggerak listrik yang dikendalikan dapat ditentukan dalam bentuk area yang batasnya sesuai dengan nilai batas parameter jaringan dan kecepatan mekanisme sentrifugal.
Lihat juga di topik ini: VLT AQUA Drive konverter frekuensi untuk unit pompa