Perangkat digital: flip-flop, pembanding, dan register
 Perangkat digital dibangun di atas elemen logis, oleh karena itu mematuhi hukum aljabar logis. Perangkat dasar teknologi digital, bersama dengan perangkat logika, adalah flip-flop.
Perangkat digital dibangun di atas elemen logis, oleh karena itu mematuhi hukum aljabar logis. Perangkat dasar teknologi digital, bersama dengan perangkat logika, adalah flip-flop.
Pemicu (pemicu bahasa Inggris - pemicu) - perangkat elektronik yang memiliki dua kondisi stabil dan dapat melompat dari satu kondisi ke kondisi lain di bawah pengaruh impuls eksternal.
Pemicu atau, lebih tepatnya, sistem pemicu disebut kelas besar perangkat elektronik yang memiliki kemampuan untuk tetap berada di salah satu dari dua kondisi stabil untuk waktu yang lama dan menggantinya di bawah pengaruh sinyal eksternal. Setiap kondisi pemicu mudah dikenali dari nilai tegangan keluaran.
Setiap keadaan pemicu sesuai dengan tingkat tegangan keluaran (tinggi atau rendah) tertentu:
1) pemicu disetel ke satu status — level «1».
2) flip-flop disetel ulang — level «0» pada output.
Kondisi tunak tetap selama yang diinginkan dan dapat diubah dengan pulsa eksternal atau dengan mematikan tegangan suplai. Che.flip-flop adalah elemen memori dasar yang mampu menyimpan unit informasi terkecil (satu bit) «0» atau «1».
Flip-flop dapat dibangun di atas elemen diskrit, elemen logika, di sirkuit terintegrasi atau merupakan bagian dari sirkuit terintegrasi.
Jenis utama flip-flop meliputi: RS-, D-, T-, dan JK-flippers... Selain itu, flip-flop dibagi menjadi asinkron dan sinkron. Dalam aktuasi asinkron, peralihan dari satu keadaan ke keadaan lain dilakukan secara langsung dengan kedatangan sinyal ke masukan informasi. Selain input data, flip-flop yang disinkronkan memiliki input jam. Pergantian mereka hanya terjadi di hadapan pulsa jam yang diaktifkan.
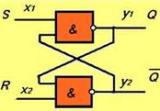
Pemicu RS memiliki setidaknya dua input: S (set — set) — pemicu disetel ke status level «1» dan R (reset) — pemicu disetel ulang ke status level «0». (Gbr. 1).
Di hadapan input C, flip-flop itu sinkron - pergantian flip-flop (perubahan keadaan output) hanya dapat terjadi pada saat kedatangan pulsa sinkronisasi (sinkronisasi) pada input C.

Gambar 1 — Representasi grafis konvensional dari flip-flop RS dan tujuan kesimpulan a) asinkron, b) sinkron
Selain keluaran langsung, flip-flop juga dapat memiliki keluaran terbalik, yang sinyalnya berlawanan.
Tabel 1 menunjukkan keadaan yang dapat diasumsikan oleh flip-flop selama operasi. Tabel tersebut menunjukkan nilai sinyal input S dan R pada saat waktu tertentu tn dan keadaan flip-flop (dari output langsung) pada saat waktu berikutnya tn + 1 setelah kedatangan berikutnya pulsa. Keadaan pemicu baru juga dipengaruhi oleh keadaan Qn sebelumnya.
Che.jika perlu untuk menulis ke pemicu «1» — kami memberikan pulsa ke input S, jika «0» — kami mengirimkan pulsa ke input R.
Kombinasi S = 1, R = 1 merupakan kombinasi terlarang karena tidak mungkin untuk memprediksi keadaan apa yang akan dibentuk pada output.
Tabel 1 - Tabel status flip-flop RS sinkron

Pengoperasian flip-flop juga dapat dilihat menggunakan diagram waktu (Gbr. 2).
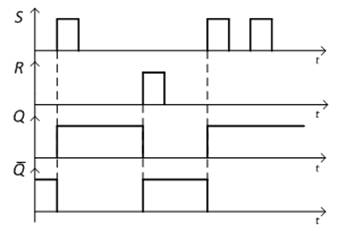
Gambar 2 — Diagram waktu dari flip-flop RS asinkron
D-trigger (dari bahasa Inggris delay — delay) memiliki satu input informasi dan input jam (sinkronisasi) (Gbr. 3).
D-flip-flop menyimpan dan menyimpan pada output Q sinyal yang ada pada input data D pada saat kedatangan pulsa jam C. flip-flop menyimpan informasi yang ditulis ketika C = 1.
Tabel 2-Tabel status D-flip-flop

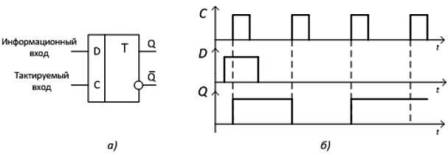
Gambar 3 — D -trigger: a) representasi grafis konvensional, b) diagram waktu operasi
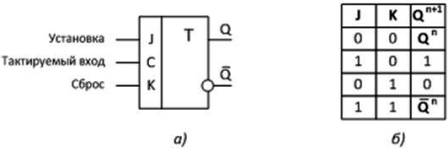
Pemicu-T (dari bahasa Inggris jatuh - terbalik, jungkir balik), juga disebut menghitung sandal jepit, memiliki satu input informasi T. Setiap pulsa (peluruhan pulsa) dari input-T (menghitung input) mengalihkan pemicu ke keadaan yang berlawanan.
Gambar 4 menunjukkan simbologi T-trigger (a) dan diagram waktu operasi (b).
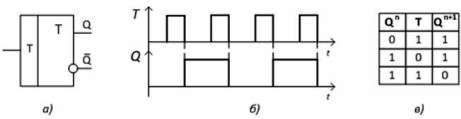
Gambar 4-T-flip-flop a) notasi grafis-konvensional, b) diagram waktu operasi c) tabel keadaan
Pemicu JK (dari bahasa Inggris jump — jump, keer — hold) memiliki dua input data J dan K dan input jam C. Penetapan pin J dan K serupa dengan penetapan pin R dan S, tetapi pemicunya memiliki tidak ada kombinasi yang dilarang. Jika J = K = 1, ia mengubah keadaannya menjadi kebalikannya (Gbr. 5).
Dengan koneksi input yang tepat, pemicu dapat menjalankan fungsi pemicu RS-, D-, T, mis. adalah pemicu universal.
Gambar 5 -JK -flip-flop a) notasi -grafik konvensional, b) tabel keadaan singkat
Komparator (bandingkan — bandingkan) — perangkat yang membandingkan dua voltase — masukan Uin dengan referensi Uref. Tegangan referensi adalah tegangan konstan dengan polaritas positif atau negatif, tegangan input berubah seiring waktu. Rangkaian komparator paling sederhana berdasarkan penguat operasional ditunjukkan pada Gambar 6, a. Jika Uin Uop pada keluaran U — us (Gbr. 6, b).
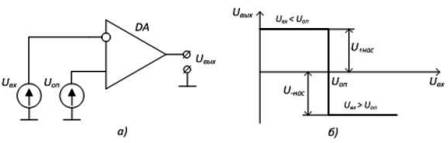
Gambar 6 — Komparator Op-amp: a) skema paling sederhana b) karakteristik kinerja
Komparator umpan balik positif disebut pemicu Schmitt. Jika komparator beralih dari «1» ke «0» dan sebaliknya pada voltase yang sama, maka pemicu Schmitt - pada voltase berbeda. Tegangan referensi menciptakan rangkaian PIC R1R2, sinyal input diumpankan ke input pembalik op-amp. Gambar 7, b, menunjukkan karakteristik transfer pemicu Schmitt.
Pada voltase negatif pada input inventaris OS Uout = U + sat. Ini berarti bahwa tegangan positif bekerja pada input non-pembalik. Saat tegangan input meningkat, arus Uin > Uneinv. (Uav — pemicu) komparator menuju status Uout = U -sat. Tegangan negatif diterapkan ke input non-pembalik. Dengan demikian, dengan penurunan tegangan input pada saat Uin <Uneinv. (Uav — pemicu) komparator masuk ke status Uout = U + sat.
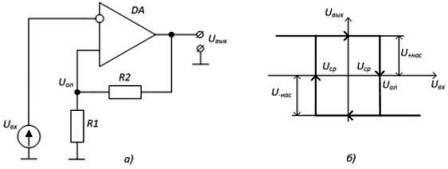
Gambar 7 — Operasi Schmitt dari op-amp: a) skema paling sederhana b) karakteristik kinerja
Sebuah contoh. Gambar 8 menunjukkan skema kontaktor relai untuk mengendalikan motor listrik, memungkinkannya untuk memulai, berhenti, dan mundur.
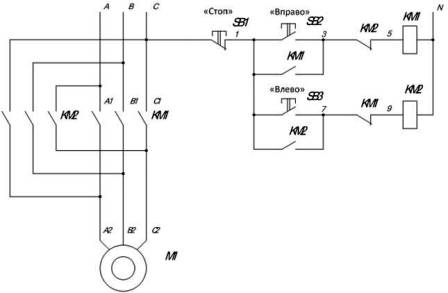
Gambar 8 — Skema kontrol motor kontaktor-relai
Pergantian motor listrik dilakukan oleh starter magnet KM1, KM2. Kontak yang tertutup secara bebas KM1, KM2 mencegah pengoperasian starter magnet secara bersamaan. Bebas membuka kontak KM1, KM2 menyediakan penguncian sendiri tombol SB2 dan SB3.
Untuk meningkatkan keandalan operasi, perlu mengganti sirkuit kontrol relai-kontaktor dan sirkuit daya dengan sistem non-kontak menggunakan perangkat dan perangkat semikonduktor.
Gambar 9 menunjukkan rangkaian kontrol motor nirkontak.
Kontak daya starter magnetik diganti dengan opto-simistor: KM1-VS1-VS3, KM2-VS4-VS6. Penggunaan optosimistor memungkinkan untuk mengisolasi sirkuit kontrol arus rendah dari sirkuit suplai yang kuat.
Pemicu menyediakan tombol pengunci sendiri SB2, SB3. Elemen logika DAN memastikan aktivasi simultan hanya dari satu starter magnetik.
Ketika transistor VT1 terbuka, arus mengalir melalui LED dari kelompok pertama opto-simistor VS1-VS3, sehingga memastikan aliran arus melalui belitan motor Pembukaan transistor VT2 memasok kelompok kedua opto-simitor VS4 -VS6, memastikan putaran motor listrik ke arah lain.
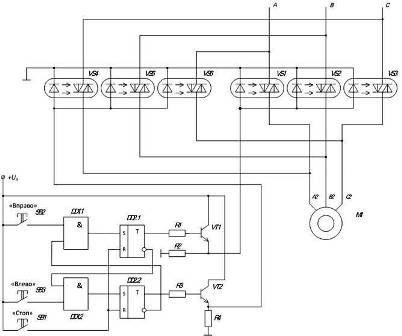
Gambar 9 — Sirkuit kontrol motor nirkontak
Daftarkan - perangkat elektronik yang dirancang untuk penyimpanan jangka pendek dan konversi bilangan biner multi-digit. Register terdiri dari flip-flop, yang jumlahnya menentukan berapa banyak bit bilangan biner yang dapat disimpan oleh register - ukuran register (Gbr. 10, a). Elemen logika dapat digunakan untuk mengatur operasi pemicu.
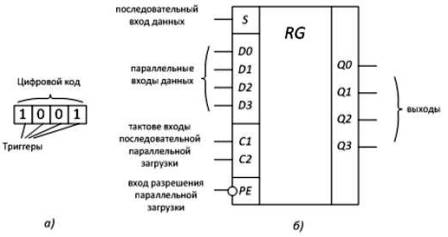
Gambar 10 — Mendaftar: a) representasi umum, b) notasi grafis konvensional
Menurut metode input dan output informasi, register dibagi menjadi paralel dan serial.
Dalam register sekuensial, flip-flop dihubungkan secara seri, yaitu keluaran dari flip-flop sebelumnya meneruskan informasi ke masukan dari flip-flop berikutnya. Input jam flip-flop C dihubungkan secara paralel. Register tersebut memiliki satu input data dan input kontrol—input clock C.
Register paralel secara bersamaan menulis ke flip-flop yang memiliki empat input data.
Gambar 10 menunjukkan UGO dan alokasi pin dari register paralel-serial empat bit.