Filter anti-aliasing dan penstabil tegangan
 Filter penghalus dirancang untuk mengurangi riak tegangan yang diperbaiki. Pemulusan riak dievaluasi oleh faktor pemulusan q.
Filter penghalus dirancang untuk mengurangi riak tegangan yang diperbaiki. Pemulusan riak dievaluasi oleh faktor pemulusan q.
Elemen utama dari smoothing filter adalah kapasitor, induktor dan transistor yang resistansinya berbeda untuk arus searah dan bolak-balik.
Bergantung pada jenis elemen filter, ada perbedaan antara filter kapasitif, induktif, dan elektronik. Menurut jumlah tautan pemfilteran, filter dibagi menjadi tautan tunggal dan multi-tautan.
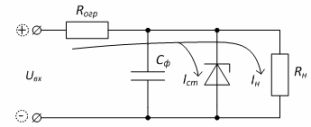
Filter kapasitif adalah kapasitor dengan kapasitas besar yang dihubungkan secara paralel dengan resistor beban Rn. Kapasitor memiliki resistansi DC yang tinggi dan resistansi AC yang rendah. Mari pertimbangkan pengoperasian filter pada contoh rangkaian penyearah setengah gelombang (Gbr. 1, a).
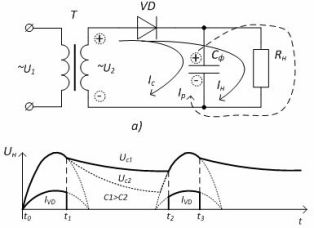
Gambar 1-Penyearah setengah gelombang fase tunggal dengan filter kapasitif: a) sirkuit b) diagram waktu operasi
Ketika setengah gelombang positif mengalir dalam interval waktu t0 — t1 (Gbr. 2.63, b), arus beban (arus dioda) dan arus muatan kapasitor mengalir.Kapasitor diisi dan pada waktu t1 tegangan dalam kapasitor melebihi penurunan tegangan belitan sekunder - dioda menutup dan dalam interval waktu t1 - t2 arus dalam beban disediakan oleh pelepasan kapasitor. Che. arus dalam beban mengalir secara konstan, yang secara signifikan mengurangi riak tegangan yang diperbaiki.
Semakin besar kapasitansi kapasitor Cf, semakin kecil eksitasinya. Ini ditentukan oleh waktu pengosongan kapasitor — konstanta waktu pengosongan τ = СfRн. Pada τ> 10, koefisien pemulusan ditentukan dengan rumus q = 2π fc m Cf Rn, dimana fc adalah frekuensi jaringan, m adalah jumlah setengah periode dari tegangan yang diperbaiki.
Disarankan untuk menggunakan filter kapasitif dengan resistor beban RH resistansi tinggi pada daya beban rendah.
Filter induktif (tersedak) terhubung secara seri dengan Rn (Gbr. 3, a). Induktansi memiliki resistansi DC rendah dan resistansi AC tinggi. Pemulusan riak didasarkan pada fenomena induksi sendiri, yang awalnya mencegah arus meningkat, dan kemudian mendukungnya dengan penurunannya (Gbr. 2, b).
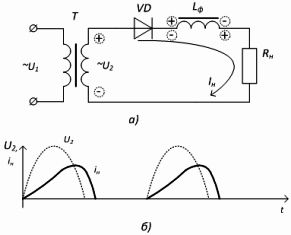
Gambar 2-Penyearah setengah gelombang fase tunggal dengan filter induktif: a) sirkuit, b) diagram waktu operasi
Filter induktif digunakan dalam penyearah daya sedang dan tinggi, yaitu penyearah yang beroperasi dengan arus beban besar.
Koefisien pemulusan ditentukan dengan rumus: q = 2π fs m Lf / Rn
Pengoperasian filter kapasitif dan induktif didasarkan pada fakta bahwa selama aliran arus yang dikonsumsi oleh jaringan, kapasitor dan induktor menyimpan energi, dan ketika tidak ada arus dari jaringan, atau berkurang, elemen memberi mematikan energi yang tersimpan, mempertahankan arus (tegangan ) pada beban.
Filter multi-persimpangan menggunakan sifat penghalusan kapasitor dan induktor. Dalam penyearah daya rendah, di mana resistansi resistor beban beberapa kOhm, alih-alih choke Lf, resistor Rf disertakan, yang secara signifikan mengurangi massa dan dimensi filter.
Gambar 3 menunjukkan jenis filter tangga LC dan RC.
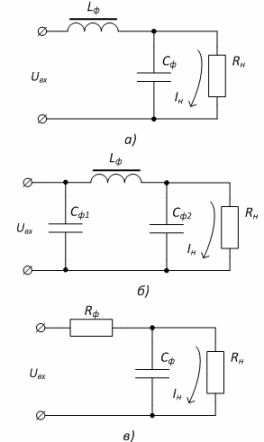
Gambar 3-Filter multi-persimpangan: a) LC berbentuk L, b) LC berbentuk U, c) Filter RC
Stabilizer dirancang untuk menstabilkan tegangan konstan (arus) beban selama fluktuasi tegangan listrik dan perubahan arus yang dikonsumsi oleh beban.
Stabilisator dibagi menjadi stabilisator tegangan dan arus, serta yang parametrik dan kompensasi. Kestabilan tegangan keluaran dievaluasi oleh faktor stabilisasi Kst.
Stabilizer parametrik berdasarkan penggunaan elemen dengan karakteristik nonlinier - semikonduktor dioda zener Tegangan dioda zener hampir konstan dengan perubahan arus balik yang signifikan melalui perangkat.
Rangkaian penstabil parametrik ditunjukkan pada Gambar 4. Tegangan input UBX didistribusikan antara resistor pembatas Rlim dan dioda zener VD yang terhubung paralel dan resistor beban Rn.
Gambar 4 — Penstabil parametrik
Ketika tegangan input meningkat, arus melalui dioda zener akan meningkat, yang berarti bahwa arus melalui resistor pembatas akan meningkat dan penurunan tegangan yang lebih besar akan terjadi melewatinya, dan tegangan beban akan tetap tidak berubah.
Stabilizer parametrik memiliki Kst urutan 20-50. Kerugian dari jenis stabilisator ini adalah arus stabilisasi yang rendah dan efisiensi yang rendah.
Stabilisator parametrik digunakan sebagai sumber tegangan tambahan, serta ketika arus beban kecil - tidak lebih dari ratusan miliampere.
Stabilizer kompensasi menggunakan resistansi variabel transistor sebagai resistor pembatas. Ketika tegangan input meningkat, resistansi transistor juga meningkat, seiring dengan penurunan tegangan, resistansi menurun. Dalam hal ini, tegangan pada beban tetap tidak berubah.
Rangkaian stabilizer dari transistor ditunjukkan pada Gambar 5. Prinsip pengaturan tegangan keluaran URn didasarkan pada perubahan konduktivitas pengaturan transistor VT1.
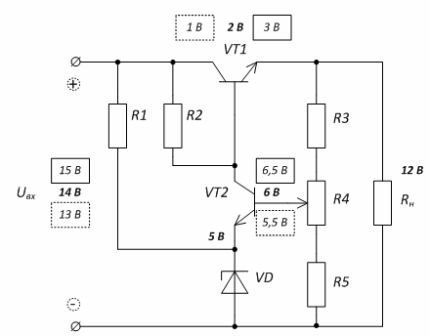
Gambar 5 — Skema regulator tegangan kompensasi
Sirkuit perbandingan tegangan dan penguat DC dipasang pada transistor VT2. Rangkaian pengukur R3, R4, R5 termasuk dalam rangkaian dasarnya, dan sumber tegangan referensi R1VD termasuk dalam rangkaian emitor.
Misalnya, ketika tegangan input meningkat, output juga akan meningkat, yang akan menyebabkan peningkatan tegangan di basis transistor VT2, sedangkan potensi VT2 emitor akan tetap sama.Ini akan menyebabkan peningkatan arus basis, dan karenanya arus kolektor transistor VT2 - potensi basis transistor VT1 akan berkurang, transistor akan menutup dan penurunan tegangan yang lebih besar akan terjadi padanya, dan tegangan keluaran akan tetap tidak berubah.
Saat ini, stabilisator diproduksi dalam bentuk sirkuit terintegrasi. Skema tipikal untuk menyalakan stabilizer terintegrasi ditunjukkan pada Gambar 6.
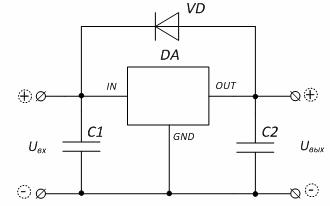
Gambar 6 — Skema tipikal untuk menyalakan penstabil tegangan bawaan
Penunjukan output dari rangkaian mikro stabilizer: «IN» — input, «OUT» — output, «GND» — umum (case). Jika stabilizer dapat disesuaikan, maka output «ADJ» — penyesuaian.
Pemilihan stabilizer didasarkan pada nilai tegangan keluaran, arus beban maksimum dan kisaran variasi tegangan masukan.