Regulator tegangan thyristor
 Regulator tegangan thyristor adalah perangkat yang dirancang untuk mengontrol kecepatan dan torsi motor listrik. Pengaturan kecepatan dan torsi dilakukan dengan mengubah tegangan yang disuplai ke stator motor dan dilakukan dengan mengubah sudut bukaan thyristor. Metode kontrol motor ini disebut kontrol fase. Metode ini adalah jenis kontrol parametrik (amplitudo).
Regulator tegangan thyristor adalah perangkat yang dirancang untuk mengontrol kecepatan dan torsi motor listrik. Pengaturan kecepatan dan torsi dilakukan dengan mengubah tegangan yang disuplai ke stator motor dan dilakukan dengan mengubah sudut bukaan thyristor. Metode kontrol motor ini disebut kontrol fase. Metode ini adalah jenis kontrol parametrik (amplitudo).
Regulator tegangan thyristor dapat diimplementasikan dengan sistem kontrol tertutup dan terbuka. Regulator loop terbuka tidak memberikan kinerja kontrol kecepatan yang memuaskan. Tujuan utamanya adalah untuk menyesuaikan torsi untuk mendapatkan mode operasi penggerak yang diinginkan dalam proses dinamis.
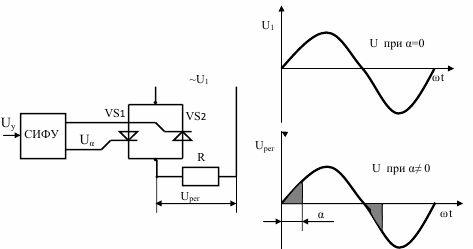
Skema sederhana dari pengatur tegangan thyristor
Bagian daya pengatur tegangan thyristor fase tunggal mencakup dua thyristor terkontrol yang memastikan aliran arus listrik pada beban dalam dua arah pada tegangan input sinusoidal.
Pengontrol thyristor loop tertutup digunakan, sebagai aturan, dengan umpan balik kecepatan negatif, yang memungkinkan untuk memiliki karakteristik mekanis penggerak yang cukup kaku di area kecepatan rotasi rendah.
Penggunaan regulator thyristor yang paling efektif untuk kontrol kecepatan dan torsi motor rotor asinkron.
Sirkuit pasokan regulator thyristor
Dalam gambar. 1, a-e menunjukkan kemungkinan skema untuk memasukkan elemen penyearah regulator dalam satu fase. Yang paling umum adalah diagram pada gambar. 1, sebuah. Ini dapat digunakan untuk skema koneksi belitan stator apa pun. Arus yang diizinkan melalui beban (nilai rms) di sirkuit ini dalam mode arus kontinu adalah:

di mana Azt adalah nilai rata-rata arus yang diizinkan melalui thyristor.
Tegangan thyristor maju dan mundur maksimum

di mana kzap — faktor keamanan dipilih dengan mempertimbangkan kemungkinan peralihan tegangan lebih di sirkuit; — nilai efektif tegangan saluran jaringan.
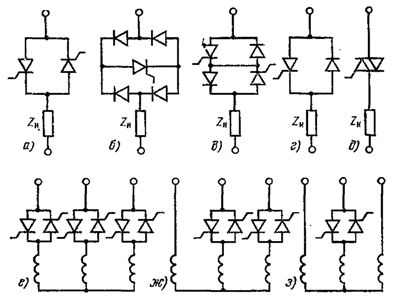
Beras. 1. Skema rangkaian daya pengatur tegangan thyristor.
Dalam diagram ara. 1b, hanya ada satu thyristor yang termasuk dalam diagonal jembatan dioda yang tidak terkontrol. Rasio antara beban dan arus thyristor untuk rangkaian ini adalah:

Dioda yang tidak terkontrol dipilih untuk arus setengah dari thyristor. Tegangan maju maksimum ke thyristor
Tegangan balik thyristor mendekati nol.
Diagram pada gambar. 1b memiliki beberapa perbedaan dari skema gbr. 1, tetapi untuk pembangunan sistem manajemen. Dalam diagram ara. 1, dan pulsa kontrol untuk masing-masing thyristor harus mengikuti frekuensi catu daya. Dalam diagram ara.1b, frekuensi pulsa kontrol dua kali lebih tinggi.
Diagram pada gambar. 1, c, terdiri dari dua thyristor dan dua dioda, jika memungkinkan, kontrol, beban, arus dan tegangan maju maksimum thyristor mirip dengan diagram pada gambar. 1, sebuah.
Tegangan balik di sirkuit ini karena aksi shunting dioda mendekati nol.
Diagram pada gambar. 1d dalam hal arus dan tegangan maju dan mundur maksimum thyristor mirip dengan rangkaian gambar. 1, sebuah. Diagram pada gambar. 1, d berbeda dari persyaratan yang dipertimbangkan untuk sistem kontrol untuk menyediakan rentang variasi yang diperlukan dari sudut kontrol thyristor Jika sudut dihitung dari tegangan fase nol, maka untuk sirkuit pada gambar. 1, a-c, relasi
dimana φ- sudut fase beban.
Untuk rangkaian Gambar. 1, d, rasio serupa berbentuk:
Kebutuhan untuk meningkatkan jangkauan perubahan sudut menjadi rumit sistem kontrol thyristor… Diagram pada gambar. 1, d dapat diterapkan ketika belitan stator dihubungkan di bintang tanpa konduktor netral dan di delta dengan penyearah termasuk dalam konduktor saluran. Cakupan skema ini terbatas pada penggerak listrik ireversibel dan reversibel dengan kontak balik.
Diagram pada gambar. 4-1, e pada propertinya mirip dengan skema pada gambar. 1, sebuah. Arus triac di sini sama dengan arus beban, dan frekuensi pulsa kontrol sama dengan dua kali frekuensi tegangan suplai. Kerugian dari rangkaian triac jauh lebih kecil daripada thyristor konvensional, nilai du / dt dan di / dt yang diperbolehkan.
Untuk regulator thyristor, skema paling rasional ada di gbr. 1, tetapi dengan dua thyristor terhubung anti-paralel.
Sirkuit daya regulator diimplementasikan dengan thyristor anti-paralel di ketiga fase (sirkuit tiga fase simetris), dalam dua dan satu fase motor, seperti yang ditunjukkan pada gambar. 1, f, g dan h masing-masing.
Dalam regulator yang digunakan dalam penggerak listrik derek, yang paling umum adalah rangkaian sakelar simetris yang ditunjukkan pada gambar. 1, e, yang ditandai dengan kerugian terendah dari arus harmonik yang lebih tinggi. Kerugian yang lebih besar di sirkuit dengan empat dan dua thyristor ditentukan oleh ketidakseimbangan tegangan pada fase motor.
Data teknis dasar untuk regulator thyristor seri PCT
Regulator thyristor dari seri PCT adalah perangkat untuk mengubah (menurut hukum yang diberikan) tegangan yang disuplai ke stator motor induksi dengan rotor belitan. Pengontrol thyristor dari seri PCT dibuat sesuai dengan sirkuit switching tiga fase simetris (Gbr. 1, e). Penggunaan regulator dari seri yang ditentukan dalam penggerak listrik derek memungkinkan pengaturan frekuensi putaran dalam kisaran 10: 1 dan pengaturan torsi mesin dalam mode dinamis selama start-up dan stop.
Regulator thyristor dari seri PCT dirancang untuk arus kontinu 100, 160 dan 320 A (arus maksimum masing-masing 200, 320 dan 640 A) dan tegangan 220 dan 380 V AC. Regulator terdiri dari tiga unit catu daya yang dirangkai pada kerangka umum (sesuai dengan jumlah fase thyristor terhubung anti-paralel), unit sensor arus, dan unit otomasi. Catu daya menggunakan thyristor tablet dengan pendingin profil aluminium ekstrusi. Pendinginan udara — secara alami. Blok otomasi sama untuk semua versi regulator.
Regulator thyristor diproduksi dengan tingkat perlindungan IP00 dan dimaksudkan untuk dipasang pada kerangka pengontrol magnetik tipe TTZ standar, yang desainnya serupa dengan pengontrol seri TA dan TCA. Dimensi dan berat keseluruhan dari regulator seri PCT ditunjukkan pada tabel. 1.
Tabel 1 Dimensi dan berat keseluruhan regulator tegangan seri PCT

Pengontrol magnetik TTZ dilengkapi dengan kontaktor arah untuk membalikkan motor, kontaktor sirkuit rotor, dan elemen kontak relai lain dari penggerak listrik, yang mengomunikasikan pengontrol dengan regulator thyristor. Struktur konstruksi sistem kontrol regulator terlihat dari diagram fungsional penggerak listrik yang ditunjukkan pada Gambar. 2.
Blok thyristor simetris tiga fase T dikendalikan oleh sistem kontrol fase SFU. Menggunakan pengontrol KK di regulator, pengaturan kecepatan BZS diubah Melalui blok BZS, dalam fungsi waktu, akselerator KU2 di sirkuit rotor dikendalikan. Perbedaan antara sinyal referensi dan tachogenerator TG diperkuat oleh amplifier U1 dan UZ Perangkat relai logika terhubung ke output amplifier UZ, yang memiliki dua kondisi stabil: satu sesuai dengan pengaktifan kontaktor arah maju KB, yang kedua - untuk menyalakan kontaktor maju arah mundur KN.
Bersamaan dengan perubahan status perangkat logika, sinyal di sirkuit kontrol switchgear dibalik. Sinyal dari amplifier pencocokan U2 dijumlahkan dengan sinyal umpan balik tertunda arus stator motor yang berasal dari blok pembatas arus TO dan diumpankan ke input SFU.
Blok logika BL juga dipengaruhi oleh sinyal dari sensor arus DT dan modul keberadaan arus NT, yang melarang pengalihan kontaktor arah saat diberi energi. Unit BL juga melakukan koreksi nonlinier pada sistem stabilisasi kecepatan untuk memastikan stabilitas drive. Regulator dapat digunakan dalam penggerak listrik dari mekanisme pengangkatan dan perjalanan.
Regulator seri PCT dibuat dengan sistem pembatas arus. Tingkat batasan arus untuk melindungi thyristor dari kelebihan beban dan untuk membatasi torsi motor dalam mode dinamis bervariasi dengan mulus dari 0,65 hingga 1,5 dari arus pengenal regulator, tingkat batasan arus untuk perlindungan terhadap arus lebih - dari 0 ,9 hingga. 2.0 nilai arus regulator. Berbagai pengaturan perlindungan memungkinkan pengoperasian regulator dengan ukuran standar yang sama dengan motor yang berbeda daya dengan faktor sekitar 2.
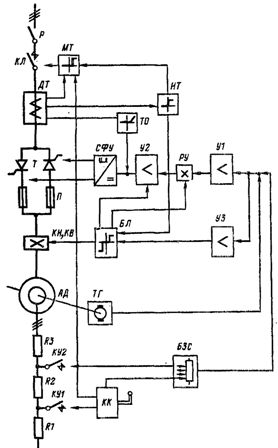
Beras. 2. Diagram fungsional penggerak listrik dengan regulator thyristor tipe PCT: KK — pengontrol perintah; TG — tachogenerator; KN, KB — kontaktor arah; BZS — blok pengaturan kecepatan; BL — blok logika; U1, U2. AS — amplifier; SFU — sistem kontrol fase; DT — sensor arus; TI — unit kehadiran saat ini; UNTUK — unit pembatas arus; MT — unit pelindung; KU1, KU2 — kontaktor percepatan; KL — kontaktor linier: R — pemutus sirkuit.
Beras. 3. PCT pengatur tegangan thyristor
Sensitivitas sistem kehadiran saat ini adalah arus 5-10 A rms dalam fase. Regulator juga memberikan perlindungan: nol, dari peralihan tegangan lebih, dari kehilangan arus di setidaknya satu fase (blok IT dan MT), dari gangguan dalam penerimaan radio.Sekring berkecepatan tinggi tipe PNB 5M memberikan perlindungan terhadap arus hubung singkat.