Motor DC tanpa sikat modern
Berkat kemajuan signifikan dalam elektronik semikonduktor dan teknologi untuk membuat magnet neodymium yang kuat, motor DC tanpa sikat banyak digunakan saat ini. Mereka digunakan dalam mesin cuci, penyedot debu, kipas angin, drone, dll.
Dan meskipun gagasan tentang prinsip pengoperasian motor tanpa sikat telah diungkapkan sejak awal abad ke-19, ia menunggu di sayap hingga awal era semikonduktor, ketika teknologi siap untuk implementasi praktis dari konsep yang menarik dan efisien ini, yang memungkinkan motor arus searah tanpa sikat berjalan seluas yang mereka lakukan saat ini. …
Dalam versi bahasa Inggris, mereka disebut mesin jenis ini Motor BLDC — Motor DC tanpa sikat - motor DC tanpa sikat. Rotor motor berisi magnet permanen, dan belitan kerja terletak di stator, yaitu perangkat motor BLDC benar-benar berlawanan dengan yang ada di motor sikat klasik. Motor BLDC dikendalikan oleh pengontrol elektronik yang disebut ESC — Pengontrol Kecepatan Elektronik — kontrol jelajah elektronik.
Regulator elektronik dan efisiensi tinggi
Regulator elektronik memungkinkan energi listrik yang disuplai ke motor brushless bervariasi dengan lancar. Tidak seperti versi pengatur kecepatan resistif yang lebih sederhana, yang hanya membatasi daya dengan menghubungkan beban resistif secara seri dengan motor, yang mengubah kelebihan daya menjadi panas, kontrol kecepatan elektronik memberikan efisiensi yang jauh lebih tinggi tanpa membuang energi listrik yang disalurkan untuk pemanasan yang tidak perlu. ..
Motor DC tanpa sikat dapat diklasifikasikan sebagai motor sinkron sinkronisasi otomatis, di mana node pemicu yang membutuhkan perawatan rutin dimatikan sepenuhnya — pengumpul… Fungsi kolektor diambil alih oleh elektronik, sehingga seluruh desain produk sangat disederhanakan dan menjadi lebih kompak.
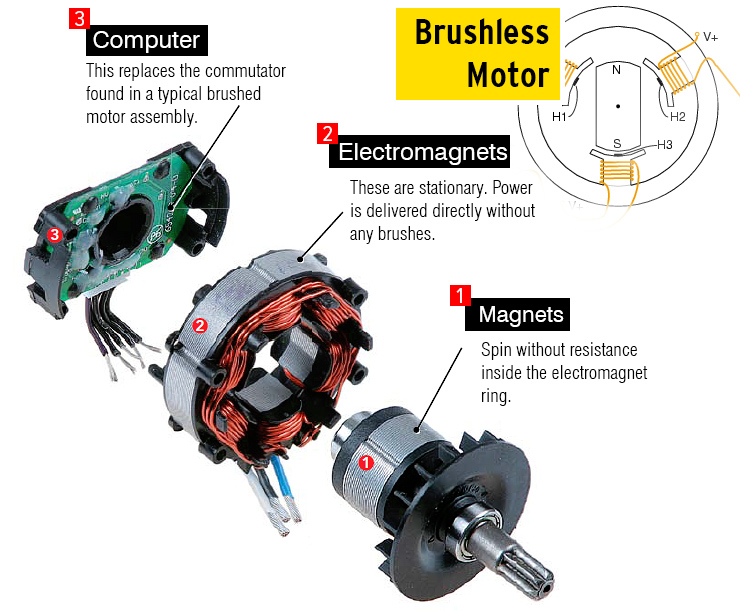
Sikat sebenarnya diganti dengan sakelar elektronik, kerugiannya jauh lebih kecil daripada dengan sakelar mekanis. Magnet neodymium yang kuat pada rotor memungkinkan torsi yang lebih besar pada poros. Dan mesin seperti itu memanas lebih sedikit dari kolektor pendahulunya.
Hasilnya, efisiensi mesin menjadi yang terbaik, dan tenaga per kilogram berat lebih tinggi, ditambah rentang pengaturan kecepatan rotor yang cukup luas dan hampir tidak ada gangguan radio yang dihasilkan. Secara struktural, mesin jenis ini mudah diadaptasi untuk bekerja di air dan di lingkungan yang agresif.
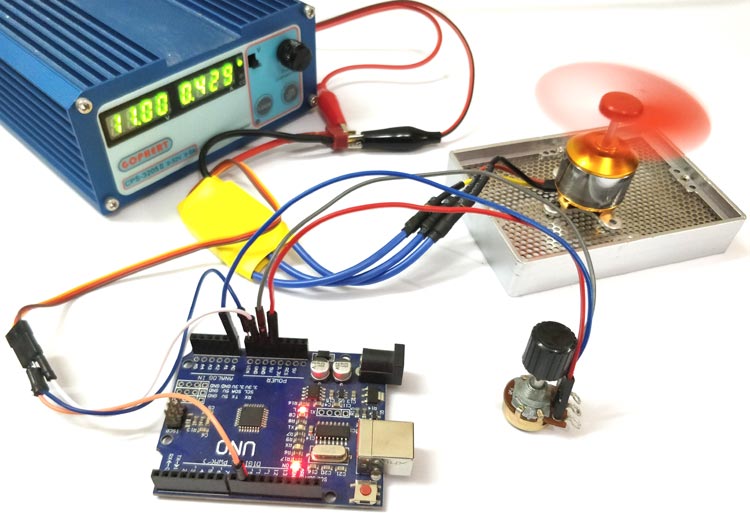
Unit kontrol elektronik adalah bagian yang sangat penting dan mahal dari motor DC tanpa sikat, tetapi tidak dapat diabaikan begitu saja.Dari perangkat ini, mesin menerima tenaga, yang parameternya secara bersamaan memengaruhi kecepatan dan tenaga yang dapat dikembangkan mesin di bawah beban.
Sekalipun kecepatan putaran tidak perlu diatur, tetap diperlukan unit pengatur elektronik, karena tidak hanya menjalankan fungsi pengatur, tetapi juga memiliki komponen catu daya. Kita dapat mengatakan bahwa ESC adalah analog dari pengontrol frekuensi untuk motor AC asinkrondirancang khusus untuk menyalakan dan mengendalikan motor DC brushless.
Kontrol motor BLDC
Untuk memahami bagaimana motor BLDC dikendalikan, pertama-tama mari kita ingat bagaimana motor komutator bekerja. Pada intinya prinsip rotasi bingkai dengan arus dalam medan magnet.
Setiap kali bingkai dengan arus berputar dan menemukan posisi kesetimbangan, komutator (sikat yang ditekan ke kolektor) mengubah arah arus melalui bingkai dan bingkai berlanjut. Proses ini diulangi saat bingkai bergerak dari tiang ke tiang. Hanya di motor pengumpul terdapat banyak rangka seperti itu dan terdapat beberapa pasang kutub magnet, oleh karena itu pengumpul sikat tidak berisi dua kontak, tetapi banyak.
ECM melakukan hal yang sama. Ini membalikkan polaritas medan magnet segera setelah rotor harus berpaling dari posisi kesetimbangan. Hanya tegangan kontrol yang tidak disuplai ke rotor, tetapi ke belitan stator, dan ini dilakukan dengan bantuan sakelar semikonduktor pada waktu yang tepat (fase rotor).
Jelas bahwa arus ke belitan stator motor tanpa sikat harus disuplai pada waktu yang tepat, yaitu ketika rotor berada pada posisi tertentu yang diketahui. Untuk melakukannya, gunakan salah satu metode berikut.Yang pertama berdasarkan sensor posisi rotor, yang kedua dengan mengukur EMF dari salah satu kumparan yang saat ini tidak menerima daya.
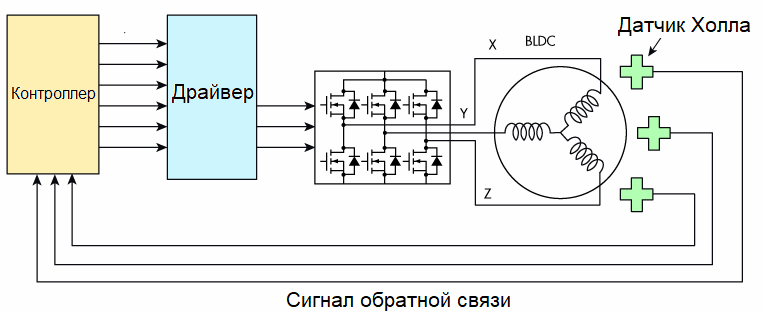
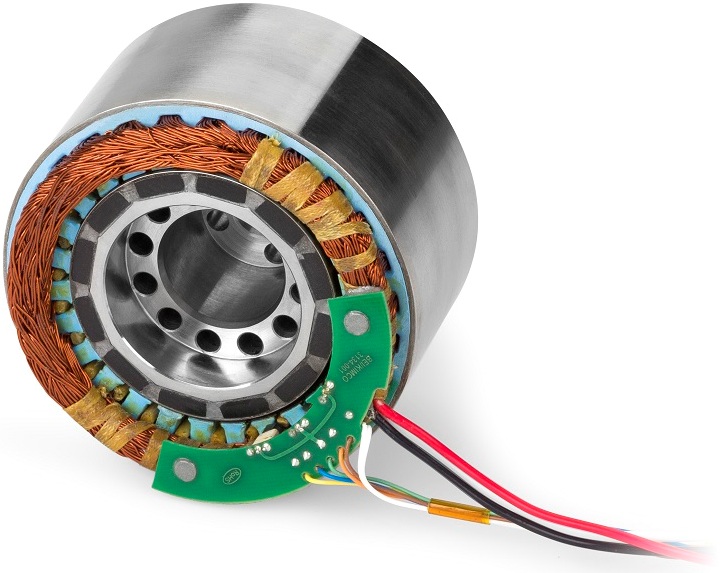
Sensornya berbeda, magnetik dan optik, yang paling populer adalah sensor magnetik efek aula… Metode kedua (berdasarkan pengukuran EMF), meskipun efektif, tidak memungkinkan kontrol yang akurat pada kecepatan rendah dan saat start-up. Sensor hall, di sisi lain, memberikan kontrol yang lebih presisi di semua mode. Ada tiga sensor seperti itu di motor BLDC tiga fase.
Motor tanpa sensor posisi rotor berlaku dalam kasus di mana motor dihidupkan tanpa beban poros (kipas, baling-baling, dll.). Jika penyalaan dilakukan dengan beban, diperlukan motor dengan sensor posisi rotor. Kedua opsi memiliki pro dan kontra.
Solusi dengan sensor berubah menjadi kontrol yang lebih nyaman, tetapi jika setidaknya salah satu sensor gagal, mesin harus dibongkar, selain itu, sensor memerlukan kabel terpisah. Dalam versi tanpa sensor, tidak diperlukan kabel khusus, tetapi selama start-up rotor akan berayun bolak-balik. Jika ini tidak dapat diterima, perlu memasang sensor di sistem.
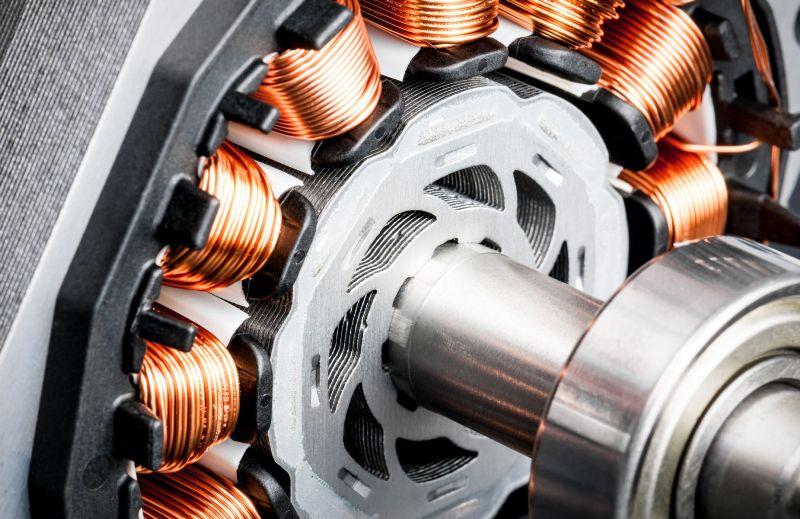
Rotor dan stator, jumlah fase
Rotor motor BLDC dapat eksternal atau internal dan masing-masing stator internal atau eksternal. Stator terbuat dari bahan konduktif magnetis, dengan jumlah gigi seluruhnya dibagi dengan jumlah fase. Rotor dapat dibuat, tidak harus dari bahan konduktif secara magnetis, tetapi harus dengan magnet yang melekat kuat padanya.

Semakin kuat magnet, semakin besar torsi yang tersedia. Jumlah gigi stator tidak boleh sama dengan jumlah magnet rotor.Jumlah minimum gigi sama dengan jumlah fase kontrol.
Sebagian besar motor DC brushless modern adalah tiga fase, hanya untuk kesederhanaan desain dan kontrol. Seperti pada motor induksi AC, belitan tiga fasa dihubungkan di sini ke stator oleh "delta" atau "bintang".
Motor semacam itu tanpa sensor posisi rotor memiliki 3 kabel daya, dan motor dengan sensor memiliki 8 kabel: dua kabel tambahan untuk memberi daya pada sensor dan tiga untuk output sinyal sensor.
Motor rotor eksternal berkecepatan rendah dibuat dengan sejumlah besar kutub (dan karenanya gigi) per fase untuk mendapatkan rotasi dengan frekuensi sudut yang jauh lebih kecil daripada frekuensi arus kontrol. Tetapi bahkan dengan motor tiga fase berkecepatan tinggi, jumlah gigi kurang dari 9 biasanya tidak digunakan.