Sistem generator — motor DC
 Berbagai peralatan mesin seringkali memerlukan kontrol kecepatan penggerak bertahap pada rentang yang lebih luas daripada yang dapat disediakan dengan menyesuaikan fluks magnet. Motor DC dengan eksitasi paralel… Dalam kasus ini, sistem penggerak listrik yang lebih kompleks digunakan.
Berbagai peralatan mesin seringkali memerlukan kontrol kecepatan penggerak bertahap pada rentang yang lebih luas daripada yang dapat disediakan dengan menyesuaikan fluks magnet. Motor DC dengan eksitasi paralel… Dalam kasus ini, sistem penggerak listrik yang lebih kompleks digunakan.
Dalam gambar. 1 menunjukkan diagram penggerak listrik yang dapat disesuaikan menurut sistem motor-generator (disingkat G — D). Dalam sistem ini, motor induksi IM secara terus-menerus memutar generator DC G yang tereksitasi secara independen dan exciter B, yang merupakan generator DC berdaya rendah yang tereksitasi paralel.
Motor DC D menggerakkan badan kerja mesin. Gulungan eksitasi generator OVG dan motor ATS disuplai oleh exciter B. Dengan mengubah resistansi rangkaian eksitasi generator G oleh rheostat 1, tegangan yang diterapkan ke angker motor D diubah, dan dengan demikian tegangan kecepatan motor diatur. Dalam hal ini, motor beroperasi pada fluks penuh dan konstan karena rheostat 2 dilepas.
Ketika tegangan U berubah, kecepatan berubah n0 kecepatan idle motor ideal D. Karena fluks motor dan resistansi rangkaian jangkarnya tidak berubah, kemiringan b tetap konstan. Oleh karena itu, karakteristik mekanis bujursangkar yang sesuai dengan nilai U yang berbeda terletak satu di bawah yang lain dan sejajar satu sama lain (Gbr. 2).
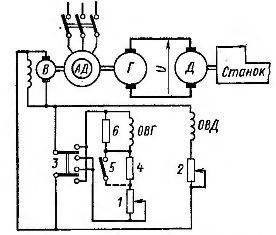
Beras. 1. Sistem generator - motor DC (dpt)
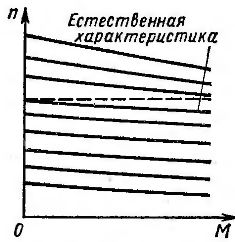
Beras. 2. Karakteristik mekanis generator — sistem motor DC
Mereka memiliki kemiringan yang lebih besar daripada karakteristik motor listrik yang sama yang diumpankan dari jaringan konstan, karena dalam sistem G — D tegangan U pada arus eksitasi generator yang konstan berkurang dengan meningkatnya beban sesuai dengan ketergantungan:
di mana mis. dan rg - e, masing-masing. dll. pp. dan resistansi internal generator.
Dengan analogi dengan motor asinkron, kami menunjukkan
Nilai ini mencirikan penurunan kecepatan engine saat beban meningkat dari nol ke nominal. Untuk karakteristik mekanis paralel
Nilai ini meningkat ketika n0 berkurang. Pada nilai sn yang besar, kondisi pemotongan yang ditentukan akan berubah secara signifikan dengan fluktuasi beban acak. Oleh karena itu, rentang pengaturan voltase biasanya kurang dari 5:1.
Saat daya pengenal motor menurun, penurunan tegangan pada motor meningkat dan karakteristik mekanis menjadi lebih curam. Karena alasan ini, rentang pengaturan voltase sistem G -D berkurang saat daya berkurang (untuk daya kurang dari 1 kW hingga 3:1 atau 2:1).
Ketika fluks magnet generator berkurang, efek demagnetisasi dari reaksi jangkarnya mempengaruhi voltase ke tingkat yang lebih besar. Oleh karena itu, karakteristik yang terkait dengan putaran mesin yang rendah sebenarnya memiliki kemiringan yang lebih besar daripada karakteristik mekanis.
Perluasan rentang kendali dicapai dengan mengurangi fluks magnet motor D melalui rheostat 2 (lihat Gambar 1), yang dihasilkan pada aliran penuh generator Metode pengaturan kecepatan ini sesuai dengan karakteristik yang terletak di atas alami satu (lihat Gambar 2).
Kisaran kontrol total, sama dengan produk dari rentang kontrol kedua metode, mencapai (10-15): 1. Regulasi tegangan adalah kontrol torsi konstan (karena fluks magnet motor tetap tidak berubah). Regulasi dengan mengubah fluks magnet motor D merupakan regulasi daya konstan.
Sebelum menghidupkan motor, D rheostat 2 (lihat Gbr. 1) dilepas seluruhnya dan fluks motor mencapai nilai tertinggi. Kemudian rheostat 1 meningkatkan eksitasi generator G. Hal ini menyebabkan tegangan meningkat dan kecepatan motor D meningkat. Jika koil OVG terhubung langsung ke UB tegangan penuh dari exciter B, arus di dalamnya, seperti pada rangkaian apa pun dengan induktansi dan resistansi aktif, akan meningkat:
di mana rv adalah resistansi koil eksitasi, LB adalah induktansinya (abaikan efek saturasi sirkuit magnetik).
Dalam gambar. 3, a (kurva 1) menunjukkan grafik ketergantungan arus eksitasi pada waktu. Arus eksitasi meningkat secara bertahap; tingkat kenaikan ditentukan oleh rasio

di mana Tv adalah konstanta waktu elektromagnetik dari belitan eksitasi generator; memiliki dimensi waktu.
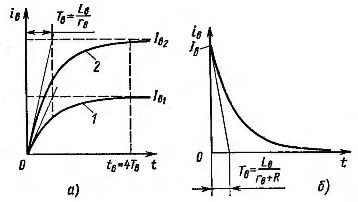
Beras. 3. Mengubah arus eksitasi pada sistem G-D
Perubahan tegangan generator saat start-up memiliki karakter yang kurang lebih sama dengan perubahan arus eksitasi. Hal ini memungkinkan motor untuk memulai secara otomatis dengan rheostat 1 dilepas (lihat Gbr. 1).
Peningkatan arus eksitasi generator sering dipercepat (dipaksa) dengan menerapkan tegangan yang melebihi nominal pada momen awal belitan eksitasi, kemudian proses peningkatan eksitasi akan berlanjut di sepanjang kurva 2 (lihat Gambar 3, a ). Ketika arus dalam koil mencapai Iv1, sama dengan arus eksitasi kondisi-mapan pada tegangan pengenal, tegangan koil eksitasi dikurangi menjadi nominal. Waktu naik arus eksitasi ke nominal berkurang.
Untuk memaksa eksitasi generator, tegangan exciter V (lihat Gambar 1) dipilih 2-3 kali lebih tinggi dari tegangan nominal koil eksitasi generator dan resistor tambahan 4 dimasukkan ke dalam rangkaian. …
Sistem generator-motor memungkinkan pengereman regeneratif. Untuk berhenti, arus di armature perlu diubah arahnya. Torsi juga akan berubah tanda dan alih-alih mengemudi, itu akan menjadi pengereman. Penghentian terjadi ketika fluks magnet motor rheostat 2 meningkat atau ketika tegangan generator berkurang dengan rheostat 1. Dalam kedua kasus, mis. dll. c. E motor menjadi lebih tinggi dari tegangan U generator.Dalam hal ini, motor D beroperasi dalam mode generator dan didorong ke rotasi oleh energi kinetik dari massa yang bergerak, dan generator G beroperasi dalam mode motor, memutar mesin IM dengan kecepatan supersinkron, yang pada saat yang sama beralih ke mode generator dan menyuplai daya ke jaringan.
Pengereman regeneratif dapat dilakukan tanpa memengaruhi rheostat 1 dan 2. Anda cukup membuka sirkuit eksitasi generator (mis. Sakelar 3). Dalam hal ini, arus dalam rangkaian tertutup yang terdiri dari belitan eksitasi generator dan resistor 6 akan berkurang secara bertahap
di mana R adalah resistansi resistor 6.
Grafik yang sesuai dengan persamaan ini ditunjukkan pada Gambar. 3, b. Penurunan arus eksitasi generator secara bertahap dalam hal ini setara dengan peningkatan resistansi rheostat 1 (lihat Gambar 1) dan menyebabkan pengereman regeneratif. Di sirkuit ini, resistor 6 yang dihubungkan secara paralel dengan belitan eksitasi generator adalah resistor pelepasan. Ini melindungi insulasi belitan eksitasi dari kerusakan jika terjadi gangguan darurat mendadak pada sirkuit eksitasi.
Ketika rangkaian eksitasi terputus, fluks magnet mesin menurun tajam, menginduksi e pada putaran koil eksitasi. dll. c.induktansi diri sangat besar sehingga dapat menyebabkan putusnya isolasi belitan. Resistor pelepasan 6 menciptakan sirkuit di mana e. dll. c. induksi sendiri kumparan medan menginduksi arus yang memperlambat penurunan fluks magnet.
Penurunan tegangan melintasi resistor pelepasan sama dengan tegangan melintasi kumparan medan.Semakin rendah nilai resistansi pelepasan, semakin rendah tegangan koil eksitasi saat sirkuit putus. Pada saat yang sama, dengan penurunan nilai resistansi resistor pelepasan, arus terus mengalir melaluinya dalam mode normal dan kerugian di dalamnya meningkat. Kedua ketentuan tersebut harus dipertimbangkan saat memilih nilai resistansi luahan.
Setelah belitan eksitasi generator dimatikan, tegangan kecil tetap ada di terminalnya karena magnet sisa. Ini dapat menyebabkan motor berputar lambat pada apa yang dikenal sebagai kecepatan creep. Untuk menghilangkan fenomena ini, belitan eksitasi generator, setelah dilepas dari exciter, dihubungkan ke terminal generator sehingga tegangan dari sisa magnetisme menyebabkan arus demagnetisasi pada belitan eksitasi generator.
Untuk membalikkan motor listrik D, arah arus di kumparan eksitasi generator OVG G diubah menggunakan sakelar 3 (atau perangkat serupa lainnya). Karena induktansi koil yang signifikan, arus eksitasi secara bertahap berkurang, berubah arah dan kemudian meningkat secara bertahap.
Proses menghidupkan, menghentikan, dan membalikkan motor dalam sistem yang dipertimbangkan sangat ekonomis, karena dilakukan tanpa menggunakan rheostat yang termasuk dalam armatur. Motor dihidupkan dan diperlambat menggunakan peralatan ringan dan kompak yang hanya mengontrol arus medan kecil. Oleh karena itu, sistem "generator - motor DC" ini direkomendasikan untuk digunakan untuk pekerjaan dengan start, rem, dan pembalikan yang sering.
Kerugian utama dari sistem motor-generator-DC adalah efisiensi yang relatif rendah, biaya tinggi dan tidak praktis karena adanya sejumlah besar mesin listrik dalam sistem tersebut. Harga sistem melebihi harga motor sangkar-tupai asinkron dengan daya yang sama 8 — 10 kali lipat. Apalagi seperti itu sistem penggerak listrik membutuhkan banyak ruang.