Pemilihan motor listrik asinkron untuk operasi dalam mode pengereman dinamis dengan eksitasi sendiri
 Motor listrik asinkron dengan rotor belitan dengan skema kontrol paling sederhana — penyertaan resistansi dalam rangkaian rotor memiliki sifat kontrol yang sangat rendah. Oleh karena itu, sebelum konverter frekuensi tersedia di pasaran, berbagai skema telah dikembangkan untuk mendapatkan penurunan kecepatan dalam mode step-down.
Motor listrik asinkron dengan rotor belitan dengan skema kontrol paling sederhana — penyertaan resistansi dalam rangkaian rotor memiliki sifat kontrol yang sangat rendah. Oleh karena itu, sebelum konverter frekuensi tersedia di pasaran, berbagai skema telah dikembangkan untuk mendapatkan penurunan kecepatan dalam mode step-down.
Sebenarnya, jumlahnya tidak banyak. Di luar negeri, penggunaan mesin listrik tambahan—rem pusaran yang dipasang pada poros yang sama dengan mesin utama—menyebar luas. Skema ini memungkinkan Anda untuk mendapatkan karakteristik mekanis yang cukup kaku saat menurunkan beban, tetapi penggerak listrik semacam itu memiliki karakteristik energi yang sangat rendah (energi pengereman dilepaskan di rem pusaran). Selain itu, rem pusaran memiliki biaya yang agak tinggi dan sangat memperumit tata letak bagian mekanis.
Oleh karena itu, untuk mendapatkan kecepatan pendaratan dalam mekanisme pengangkatan berdasarkan motor asinkron dengan rotor fase di pabrik Dynamo pada akhir tahun 1970-an, tim desain yang dipimpin oleh E.M. Pevzner memperkenalkan self-excited dynamic braking.
Penggerak listrik semacam itu banyak digunakan pada crane domestik (panel tipe TSD, TSDI, KSDB untuk jembatan, gantry dan gantry crane, panel kontrol untuk tower crane KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). Jadi, kita berbicara tentang puluhan ribu derek yang beroperasi.
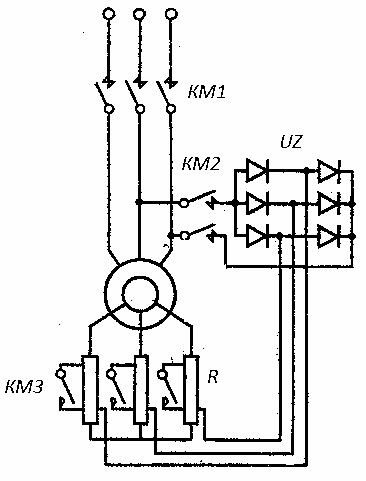
Beras. 1. Skema dimasukkannya motor asinkron dalam mode pengereman dinamis dengan eksitasi sendiri
Prinsip pengereman dinamis dengan eksitasi sendiri adalah sebagai berikut:
Rangkaian rotor meliputi penyearah tiga fasa UZ (Gbr. 1). Motor listrik terputus dari jaringan melalui kontaktor KM1. Tegangan yang diperbaiki terhubung ke belitan stator melalui kontaktor KM2. Kontaktor kontak KM3 ditutup. Saat rem dilepas (tidak diperlihatkan dalam diagram), poros motor mulai berputar di bawah pengaruh beban yang jatuh.
EMF diinduksi dalam belitan rotor, di bawah pengaruh arus mulai mengalir di sirkuit rotor-stator. Motor mengembangkan torsi pengereman, beban diturunkan pada kecepatan konstan. Nilai kecepatan ditentukan oleh nilai resistansi rangkaian rotor. Semakin besar hambatannya, semakin cepat laju penurunannya. Untuk menambah kecepatan, kontaktor KM3 dimatikan.
Dalam mode pengereman dinamis eksitasi sendiri, penggerak listrik mengkonsumsi daya dari jaringan hanya untuk menyalakan pendorong hidrolik rem dan peralatan kontaktor relai. Sebagai contoh, Gambar. 7 menunjukkan karakteristik mekanis penggerak listrik dengan panel TSD.
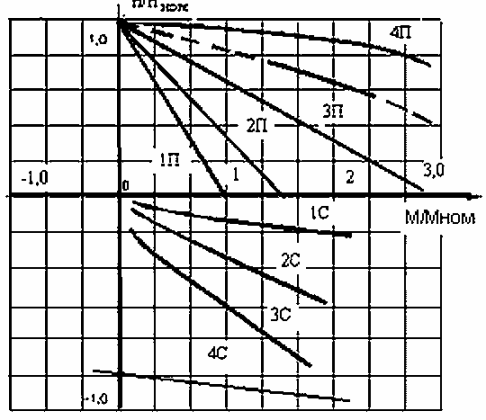
Beras. 2. Karakteristik mekanis penggerak listrik dari mekanisme pengangkatan dengan panel TSD
Karakteristik pengereman dinamis ditetapkan sebagai 1C, 2C, 3C. Dapat dilihat bahwa karakteristik memiliki kekerasan yang cukup. Penyesuaian kecepatan dilakukan dalam kisaran 1: 8, yang dalam banyak kasus cukup untuk faucet massal.
Kondisi eksitasi sendiri motor listrik adalah:
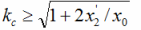
Di mana x '2- resistensi induktif dari belitan rotor, Ohm; хо- resistensi induktif dari sirkuit magnetisasi. Om
Dimana ks — koefisien skema
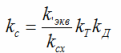
kd - koefisien reduksi arus rotor ke arus stator; kcx - koefisien rangkaian koreksi, untuk rangkaian jembatan tiga fasa kx = 0,85; kt adalah koefisien transformasi motor dari stator ke rotor
Koefisien kd tergantung pada skema sambungan belitan stator yang dihubungkan ke bintang pada motor faucet rumah tangga pada tegangan listrik 380 V.
Koefisien kt bergantung pada koefisien transformasi, yaitu rasio tegangan stator terhadap tegangan rotor, yang tergantung pada jenis motor. Misalnya, untuk beberapa motor listrik seri MT dan 4MT, nilai dan parameter terkait ditabulasikan. 1.
Tabel 1.
Jenis daya motor listrik, kWt Tegangan rotor, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1,5 1,3 0,173 3,74 1,04 4MTN225L6 55 290 1,31 1,31 0,197 3,73 1,05 MTN512-6 55 340 1,11 0,98 0,197 3,8 1,05 4MTN280L10 75 308 1,23 1,06 0,146 2,33 1,06 4MTN280M6 110 420 0,9 0,7 0,083 2,98 1,02
Kondisi кс ≥ √(1 + 2х '2/хо) dilakukan untuk mesin tipe MTN412-6, 4MTN225L6, yang dapat disebut "bersemangat". Motor listrik semacam itu memasuki mode eksitasi sendiri tanpa membuat keputusan rangkaian tambahan. Namun, pada perangkat lengkap bertegangan rendah (saklar bertegangan rendah atau panel kontrol) yang dirancang untuk bekerja bersama dengan motor semacam itu, eksitasi awal kecil disediakan untuk pengoperasian yang andal.
Eksitasi awal dilakukan dengan melewati sebuah konstanta, yang disebut Nilai kecil "arus suplai" (biasanya tidak lebih dari 10% arus pengenal motor) dari penyearah setengah gelombang. Untuk motor tereksitasi, bagaimanapun, ini cukup untuk transisi yang andal ke mode pengereman dinamis tereksitasi sendiri.
Motor listrik MTN512-6, 4MTN280M6, yang kondisinya кс ≥ √(1 + 2х '2/хо) tidak terpenuhi, "tidak bersemangat". Ini tidak berarti bahwa motor semacam itu tidak dapat beroperasi dalam mode pengereman dinamis dengan eksitasi sendiri, tetapi nilai arus tambahan yang diperlukan untuknya mencapai 50% dari arus pengenal stator.Ini memerlukan penggunaan NKU (panel kontrol) khusus untuk motor listrik non-eksitasi. …
Motor listrik tipe 4MTN280L10 dengan кс = √(1 + 2х '2/хо) berada pada batas eksitasi sendiri dan setiap perubahan acak pada parameter dapat melanggar kondisi eksitasi sendiri. Oleh karena itu, motor semacam itu juga dapat digolongkan sebagai non-excitable.
Parameter utama yang mempengaruhi kemampuan motor listrik untuk membangkitkan sendiri adalah tegangan pengenal rotor E2nom. Nilai kritis E2nom, di mana eksitasi sendiri tidak terjadi tanpa arus suplai yang besar, harus diambil sebagai 300 V.
Karakteristik mode pengereman dinamis eksitasi sendiri ini diperhitungkan oleh pabrik Dynamo dan Sibelektromotor PO saat mengembangkan rangkaian motor listrik derek 4MT pada awal 1980-an.
Secara khusus, nilai E2nom untuk beberapa motor listrik telah dikurangi dibandingkan dengan seri MT sebelumnya untuk membuat motor lebih menarik.
Misalnya, untuk motor listrik 4MTN225L6, yang banyak digunakan pada penggerak listrik tower crane, E2nom berkurang dibandingkan dengan motor seri MTN512-6 sebelumnya dari 340 menjadi 290 V, yang membuat motor bersemangat sendiri. Belakangan, OJSC "Sibelectromotor" memulai produksi motor listrik 4MTM225L6 dengan parameter yang sama.
Seiring berjalannya waktu, motor listrik dengan tujuan serupa mulai diproduksi oleh pabrikan lain.
Pabrik Konstruksi Derek Rzhevsky memproduksi motor listrik MKAF225L6, Perusahaan Elektroteknik Siberia memproduksi motor listrik PND 4MTM225L6.Meskipun tampilannya berbeda dari prototipe terkait dengan kemampuan teknologi masing-masing pabrikan, semua motor listrik ini memiliki parameter kelistrikan dan dimensi pemasangan yang sama dan sepenuhnya dapat dipertukarkan.
Perbedaan nama mesin memungkinkan pengguna untuk membuat pilihan berdasarkan informasi dari satu atau pabrikan lain, dipandu oleh preferensi, harga, waktu pengiriman, dll. Dan pada saat yang sama, pastikan sepenuhnya bahwa mengganti motor listrik dari satu pabrikan faucet dengan motor listrik pabrikan lain tidak akan menyebabkan kerusakan faucet atau kecelakaan.
Namun, dalam satu dekade terakhir, motor listrik dari berbagai pabrikan telah muncul di pasar domestik, yang mereknya persis mereproduksi merek motor listrik "asli" yang diproduksi oleh JSC "Sibelectromotor". Dapat diasumsikan bahwa asal mula motor listrik terhubung dengan tetangga timur besar negara kita. Harganya sedikit lebih rendah daripada produsen tradisional, jadi minat mereka dari pasokan perusahaan bisa dimengerti.
Jadi, dengan memesan motor listrik untuk dipasang pada derek yang diproduksi atau mengganti motor listrik yang rusak pada derek dengan yang berfungsi, Anda bisa mendapatkan motor listrik dari pabrikan yang tidak dikenal, dengan E2nom berbeda dari motor listrik prototipe.
Situasinya agak mengingatkan pada awal tahun 90-an, ketika beberapa grup pop dengan nama yang sama melakukan tur keliling negara pada waktu yang bersamaan.
Mari kita ingat sekali lagi bahwa rasio E2nom / I2nom adalah parameter terpenting dari motor dengan rotor belitan, yang memengaruhi pilihan resistor start, peralatan kontaktor relai dan, seperti disebutkan di atas, pada kondisi eksitasi sendiri dari motor listrik.
Namun, seringkali, tidak ada data rotor sama sekali pada pelat nama mesin hasil kloning. Ini contohnya:
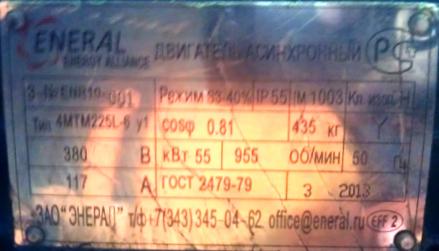
Beras. 3. Papan nama motor asinkron rotor derek
Omong-omong, motor listrik ini memiliki nilai E2nom yang «benar», hanya sekarang harus ditentukan secara empiris.
Dalam katalog pabrikan lain untuk motor listrik 4MTM225L6, nilai E2nom = 340 V ditunjukkan, mis. motor yang bersemangat menjadi tidak bersemangat. Konsekuensi dari penggunaan motor listrik seperti itu sebagai bagian dari penggerak listrik dengan pengereman dinamis dengan eksitasi sendiri adalah penurunan beban dan pemisahan motor listrik dengan kerusakan mekanis belitan rotor dan stator.
Gambar inilah yang penulis amati baru-baru ini di salah satu perusahaan pembuat mesin Rusia tertua, di mana derek jembatan baru dengan motor listrik kloning tipe 4MTM225L6 dengan E2n = 340 V dikirimkan. Hanya karena keberuntungan, orang tidak melakukannya menderita. Selain itu, pemilik derek memulihkan mesin tiga (!) kali setelah menghindar.
Pabrikan motor listrik tiruan lainnya, yang ternyata berulang kali mengalami kecelakaan serupa, kini memproduksi dua motor listrik dengan merek yang sama (!). Satu dengan E2nom = 340 V, yang lain dengan E2nom = 264 V diberikan dalam katalog dengan catatan: "untuk keran tipe KB", mis. tower crane.
Motor seperti ini memang paling banyak digunakan pada tower crane, namun juga dipasang pada bridge crane. Sehingga Anda dapat mendengar dialog antara Pemasok dan Pelanggan: “Motor derek apa yang Anda butuhkan? Untuk lantai. Kemudian ambil yang ini (E2nom = 340 V). » Dan di penggerak kerekan listrik terdapat panel kontrol dengan pengereman dinamis self-excited. Hasilnya dijelaskan di atas.
Pada saat yang sama, tidak ada yang mengatakan bahwa motor listrik ini rusak atau tidak dapat diandalkan dan tidak dapat digunakan pada derek. Semakin banyak pilihan di pasar, semakin baik. Seperti yang mereka katakan, ada mesin yang lebih bagus dan berbeda. Hanya saja merek mereka menyesatkan konsumen, yang bisa menimbulkan konsekuensi berbahaya.
Untuk menggunakan motor listrik dengan parameter rotor selain prototipe, Anda harus:
-
Ukur E2nom saat rangkaian rotor terbuka dan belitan stator terhubung ke grid;
-
Berdasarkan pengukuran E2nom, hitung, pilih dan pesan resistor ballast;
-
Pilih panel kontrol untuk motor listrik non-eksitasi dari katalog dan pesan.
Atau Anda bisa langsung bertanya tentang nilai E2nom sebelum memesan mesin yang menarik dengan harganya dan secara khusus menyetujuinya dalam kontrak. Namun, hal ini tidak menghalangi pengukuran E2nom selama kontrol masukan dari motor yang dipesan.
Meringkas hal di atas, kita dapat menarik kesimpulan berikut:
-
Dalam penggerak listrik faucet rumah tangga berdasarkan motor listrik rotor fase, pengereman dinamis self-excited banyak digunakan. Puluhan ribu penggerak listrik semacam itu sedang beroperasi. Mereka masih dikeluarkan.
-
Untuk beroperasi dalam mode pengereman dinamis self-excited, motor listrik harus memiliki rasio E2nom / I2nom tertentu.
-
Kondisi utama eksitasi sendiri motor listrik dengan rotor belitan adalah nilai E2nom ≤ 300 V.
-
Penggunaan motor listrik dengan E2nom > 300 V dengan panel kontrol yang dirancang untuk motor listrik tereksitasi dapat menyebabkan beban turun dan merusak motor listrik.