Encoder — Sensor sudut putar
 Pemosisian dalam berbagai jenis peralatan industri disediakan menggunakan perangkat yang terlihat sederhana — encoder (atau dengan kata lain, sensor sudut).
Pemosisian dalam berbagai jenis peralatan industri disediakan menggunakan perangkat yang terlihat sederhana — encoder (atau dengan kata lain, sensor sudut).
Encoder digunakan untuk mengubah gerakan linier atau putar menjadi sinyal digital biner. Encoder adalah perangkat yang porosnya terhubung ke poros berputar dari objek yang diteliti dan menyediakan kontrol elektronik dari sudut rotasi yang terakhir. Menurut prinsip operasi, pembuat enkode dibagi menjadi optik dan magnetik.
Pada poros enkoder optik terdapat cakram dengan jendela terputus-putus di sekelilingnya, di mana terdapat LED dan fototransistor, yang memastikan pembentukan sinyal keluaran dalam bentuk kereta pulsa persegi panjang dengan frekuensi yang sebanding dengan jumlah jendela dan kecepatan putaran piringan / poros. Jumlah pulsa menunjukkan sudut rotasi.
Encoder optik tersedia sebagai encoder inkremental dan absolut.
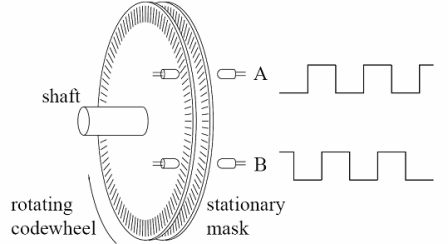
Encoder tambahan memiliki disk intermiten dengan banyak jendela dengan ukuran yang sama dengan radius dasar dan dua bacaan optocoupler, yang memungkinkan Anda untuk memperbaiki sudut putaran dan arah putaran poros.Pada jari-jari ekstra disk ada satu jendela istirahat dan optocoupler yang sesuai yang menentukan posisi awal (rumah).
Torsi Negatif - Encoder inkremental menyediakan pembacaan relatif dari sudut rotasi, informasi yang tidak disimpan saat rotasi dihentikan. Keuntungannya termasuk kesederhanaan desain (dan, karenanya, biaya rendah) pada resolusi tinggi dan frekuensi operasi tinggi.
Encoder tambahan dengan peningkatan daya tahan difokuskan pada aplikasi industri - dalam teknik mesin, rolling mills, pembuatan kapal, tekstil, alas kaki, pengerjaan kayu. Untuk pembuat enkode seperti itu, parameter yang menentukan adalah resolusi sudut rotasi, kemampuan untuk bekerja pada frekuensi tinggi, tingkat perlindungan yang tinggi untuk menahan kondisi lingkungan yang keras.
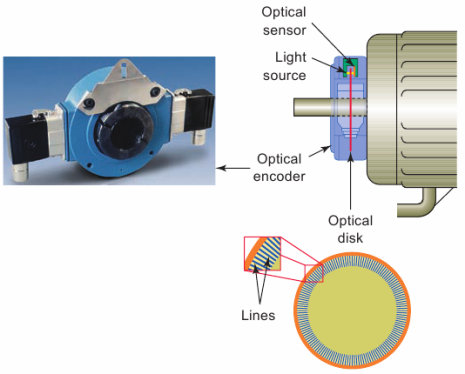
Disk dengan garis atau takik yang mengganggu berkas cahaya ke sensor optik. Sebuah sirkuit elektronik merasakan sinar pecah dan menghasilkan pulsa output digital dari encoder.
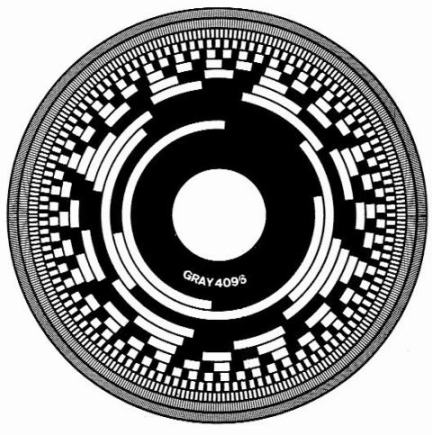
Encoding disk — perangkat untuk mengubah perpindahan sudut poros menjadi bentuk digital. Gambar geometris dari kode digital diterapkan ke disk penyandian. Simbol bit kode diterapkan pada jalur konsentris, dan bit yang paling tidak signifikan (kurang signifikan) terletak lebih dekat ke pinggiran.
Bergantung pada metode membaca kode (kontak, fotolistrik, elektromagnetik, induksi, elektrostatis, dll.), Gambar geometrik kode terdiri dari konduktif listrik dan terisolasi listrik, transparan dan buram, magnetik dan non-magnetik, dll.
Yang paling tersebar luas adalah pengkodean disk dengan jenis kode biner, yang mengecualikan terjadinya kesalahan saat melintasi batas bagian diskrit yang terpisah, ketika beberapa bit dapat dibaca di satu sisi batas, dan beberapa di sisi lain (karena pemasangan yang tidak akurat perangkat yang dapat dilepas atau karena kode baca yang tidak bersamaan saat disk berputar Kode-kode ini termasuk yang disebut kode Fau (kode Barker) dan kode Refleks (kode Abu-abu).
Beberapa encoder putar optik menggunakan disk encoder reflektif. Disk ini memiliki bagian bolak-balik yang menyerap atau memantulkan cahaya, dan sumber cahaya beserta penerima terletak di satu sisi disk. Jika hanya ada satu sumber cahaya dan penerima, urutan pulsa dari sensor memungkinkan Anda untuk mengetahui berapa banyak langkah yang telah diputar disk relatif terhadap posisi sebelumnya.
Sebuah sensor tidak dapat mengetahui arah putaran, tetapi jika Anda menambahkan pasangan sumber-ke-penerima kedua, 90 dari fase dari yang pertama, maka mikrokontroler akan dapat menentukan arah putaran disk dengan perbedaan fase antara kereta pulsa.
Harus diingat bahwa sistem apa pun yang mendeteksi rotasi relatif disk tetapi tidak dapat mengukur posisi sudut absolutnya adalah encoder inkremental.
Encoder absolut memiliki disk terputus-putus dengan jendela konsentris dengan jari-jari berbeda yang ukuran relatifnya ditentukan oleh kode biner dan dibaca secara bersamaan, memberikan sinyal keluaran berkode untuk setiap posisi sudut (kode abu-abu, kode biner ...).
Dalam hal ini, dimungkinkan untuk memperoleh data pada posisi sesaat poros tanpa penghitung digital atau kembali ke posisi awal, karena output memiliki kata kode — «n bit», terlindung dari kebisingan listrik.
Encoder absolut digunakan dalam aplikasi yang membutuhkan penyimpanan data input untuk waktu yang lama, tetapi lebih kompleks dalam desain dan lebih mahal.
Encoder absolut dengan antarmuka fieldbus memiliki antarmuka keluaran untuk komunikasi fieldbus sesuai dengan standar CANopen, ProfiBus, DeviceNet, Ethernet, InterBus dan menggunakan kode biner untuk menentukan sudut rotasi. Antarmuka komunikasi di atas dapat diprogram berdasarkan sejumlah parameter: misalnya arah rotasi, resolusi pulsa per revolusi, baud rate.

Encoder yang dipasang pada poros motor secara efektif memberikan kontrol pemosisian yang tepat. Encoder semacam itu biasanya diproduksi dalam versi «lubang» dan sambungan khusus merupakan elemen penting dari desainnya, yang memungkinkan untuk mengkompensasi serangan balik poros motor.
Pemosisian dalam kondisi di atas paling efektif menyediakan enkoder magnetik, di mana konversi perpindahan sudut poros menjadi sinyal elektronik dilakukan secara non-kontak berdasarkan efek Hall, tidak terkait dengan rotasi pemotong optik di dalam sensor dan memungkinkan pemrosesan sinyal dengan kecepatan hingga 60.000 rpm.
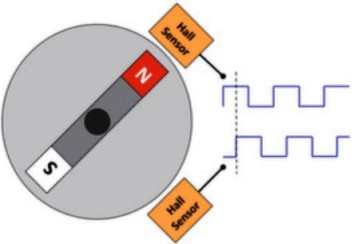
Dalam encoder magnetik, rotasi berkecepatan tinggi dari poros eksternal, di mana magnet silinder permanen dipasang, dirasakan oleh sensor Hall yang digabungkan pada kristal semikonduktor tunggal dengan pengontrol pemrosesan sinyal.
Ketika kutub magnet permanen berputar di atas sirkuit mikro dengan sensor aula vektor induksi magnetik variabel menginduksi tegangan Hall, yang berisi informasi tentang nilai sesaat dari sudut putaran poros. Mikrokontroler menyediakan konversi cepat tegangan Hall ke parameter sudut pemosisian.

Kemungkinan konversi semacam itu tanpa koneksi mekanis langsung dari magnet dan elemen sensor Hall adalah keunggulan utama pembuat enkode magnetik, memberi mereka keandalan dan daya tahan tinggi dan memungkinkan mereka bekerja secara efisien dalam aplikasi berkecepatan tinggi yang terkait dengan otomasi industri, pencetakan, pengerjaan logam , Peralatan Ukur dan Ukur.