Pengukur fase - tujuan, jenis, perangkat, dan prinsip tindakan
 Alat pengukur listrik disebut pengukur fase, yang fungsinya untuk mengukur sudut fase antara dua osilasi listrik dengan frekuensi konstan. Misalnya, dengan menggunakan pengukur fasor, Anda dapat mengukur sudut fasa dalam jaringan tegangan tiga fasa. Pengukur fase sering digunakan untuk menentukan faktor daya, cosinus phi, dari setiap instalasi listrik. Dengan demikian, pengukur fase banyak digunakan dalam pengembangan, commissioning, dan pengoperasian berbagai perangkat dan peralatan listrik dan elektronik.
Alat pengukur listrik disebut pengukur fase, yang fungsinya untuk mengukur sudut fase antara dua osilasi listrik dengan frekuensi konstan. Misalnya, dengan menggunakan pengukur fasor, Anda dapat mengukur sudut fasa dalam jaringan tegangan tiga fasa. Pengukur fase sering digunakan untuk menentukan faktor daya, cosinus phi, dari setiap instalasi listrik. Dengan demikian, pengukur fase banyak digunakan dalam pengembangan, commissioning, dan pengoperasian berbagai perangkat dan peralatan listrik dan elektronik.
Ketika fasor terhubung ke sirkuit yang diukur, perangkat terhubung ke sirkuit tegangan dan ke sirkuit pengukuran arus. Untuk jaringan suplai tiga fasa, fasor dihubungkan oleh tegangan ke tiga fasa, dan oleh arus ke belitan sekunder transformator arus juga dalam tiga fasa.
Bergantung pada perangkat pengukur fase, skema koneksi yang disederhanakan juga dimungkinkan, ketika juga terhubung ke tiga fase dengan voltase, dan dengan arus - ke hanya dua fase.Fase ketiga kemudian dihitung dengan menjumlahkan vektor dari hanya dua arus (dua fase terukur). Tujuan dari pengukur fase — pengukuran kosinus phi (faktor daya), jadi dalam bahasa biasa disebut juga «cosine meter».
Saat ini Anda dapat menemukan pengukur fase dari dua jenis: elektrodinamik dan digital. Pengukur fase elektrodinamik atau elektromagnetik didasarkan pada skema sederhana dengan mekanisme proporsional untuk mengukur pergeseran fase. Dua rangka yang dipasang secara kaku satu sama lain, dengan sudut antara 60 derajat, dipasang pada sumbu penyangga dan tidak ada momen mekanis yang berlawanan.
Dalam kondisi tertentu, yang diatur dengan mengubah pergeseran fasa arus di sirkuit kedua bingkai ini, serta sudut pemasangan bingkai ini satu sama lain, bagian yang dapat digerakkan dari alat pengukur diputar dengan sudut yang sama. ke sudut fase. Skala linier perangkat memungkinkan Anda merekam hasil pengukuran.
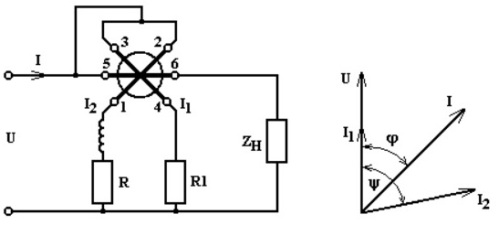
Mari kita lihat prinsip pengoperasian pengukur fase elektrodinamik. Ini memiliki kumparan tetap arus I dan dua kumparan bergerak. Arus I1 dan I2 mengalir melalui masing-masing kumparan bergerak. Arus yang mengalir menciptakan fluks magnet di kedua kumparan stasioner dan kumparan bergerak. Dengan demikian, fluks magnet yang berinteraksi dari kumparan menghasilkan dua torsi M1 dan M2.
Nilai momen-momen ini bergantung pada posisi relatif kedua kumparan, pada sudut rotasi bagian yang bergerak dari alat pengukur, dan momen-momen ini diarahkan ke arah yang berlawanan.Nilai rata-rata momen tergantung pada arus yang mengalir di kumparan bergerak (I1 dan I2), pada arus yang mengalir di kumparan stasioner (I), pada sudut pergeseran fasa arus kumparan bergerak relatif terhadap arus dalam kumparan stasioner (ψ1 dan ψ2 ) dan pada belitan parameter desain.
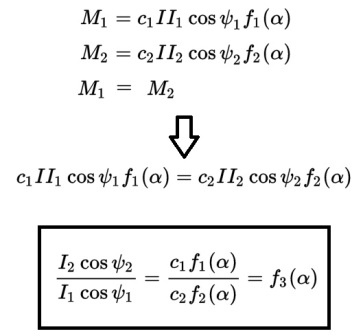
Akibatnya, bagian yang dapat digerakkan dari perangkat berputar di bawah aksi momen-momen ini hingga terjadi kesetimbangan, yang disebabkan oleh persamaan momen yang dihasilkan dari rotasi. Skala pengukur fase dapat dikalibrasi dalam hal faktor daya.
Kerugian dari pengukur fase elektrodinamik adalah ketergantungan pembacaan pada frekuensi dan konsumsi energi yang signifikan dari sumber yang dipelajari.
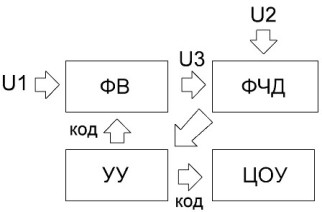
Pengukur fase digital dapat diimplementasikan dalam berbagai cara. Misalnya, pengukur fase kompensasi memiliki tingkat akurasi yang tinggi meskipun dijalankan dalam mode manual, tetapi perhatikan cara kerjanya. Ada dua tegangan sinusoidal U1 dan U2, pergeseran fasa yang perlu Anda ketahui.
Tegangan U2 dipasok ke pemindah fasa (PV), yang dikendalikan oleh kode dari unit kontrol (UU). Pergeseran fasa antara U3 dan U2 berangsur-angsur berubah hingga tercapai kondisi dimana U1 dan U3 sefase. Dengan menyesuaikan tanda pergeseran fasa antara U1 dan U3, detektor peka fasa (PSD) ditentukan.
Sinyal keluaran dari detektor peka fase diumpankan ke unit kontrol (CU). Algoritma balancing diimplementasikan menggunakan metode pulse code. Setelah proses penyeimbangan selesai, kode faktor pergeseran fasa (PV) akan menyatakan pergeseran fasa antara U1 dan U2.
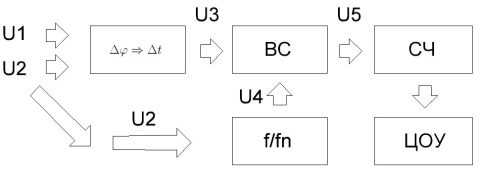
Mayoritas meter fase digital modern menggunakan prinsip penghitungan diskrit.Metode ini bekerja dalam dua langkah: mengubah pergeseran fasa menjadi sinyal dengan durasi tertentu, dan kemudian mengukur durasi pulsa ini menggunakan bilangan diskrit. Perangkat ini berisi konverter fase-ke-pulsa, pemilih waktu (VS), pulsa pembentuk diskrit (f / fn), penghitung (MF) dan DSP.
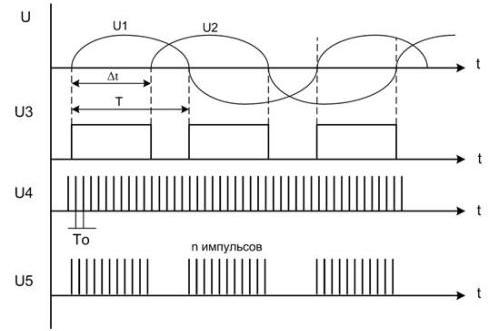
Konverter fase ke pulsa dibentuk dari U1 dan U2 dengan pergeseran fase Δφ pulsa persegi panjang U3 sebagai urutan. Pulsa U3 ini memiliki tingkat pengulangan dan siklus kerja yang sesuai dengan frekuensi dan offset waktu dari sinyal input U1 dan U2. Pulsa U4 dan U3 membentuk pulsa indera diskrit periode T0 yang diterapkan pada pemilih waktu. Pemilih waktu pada gilirannya terbuka selama pulsa U3 dan berputar melalui pulsa U4. Sebagai hasil dari keluaran pemilih waktu, semburan pulsa U5 diperoleh, periode pengulangannya adalah T.
Pencacah (MF) menghitung jumlah pulsa dalam paket serial U5, sehingga jumlah pulsa yang diterima di pencacah (MF) sebanding dengan pergeseran fasa antara U1 dan U2. Kode dari penghitung dikirim ke pusat kendali pusat, dan pembacaan perangkat ditampilkan dalam derajat dengan akurasi sepersepuluh, yang dicapai dengan tingkat keleluasaan perangkat. Kesalahan diskresi terkait dengan kemampuan untuk mengukur Δt dengan akurasi satu periode hitungan pulsa.
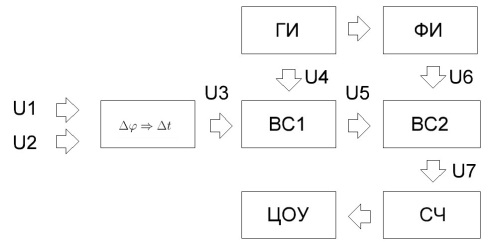
Digital cosine phi rata-rata pengukur fase elektronik dapat mengurangi kesalahan dengan merata-ratakan selama beberapa periode T dari sinyal uji.Struktur pengukur fase rata-rata digital berbeda dari jumlah rangkaian diskrit dengan adanya pemilih waktu lain (BC2), serta generator pulsa (GP) dan generator pulsa diskrit (PI).
Di sini, konverter fase-pergeseran U5 menyertakan generator pulsa (PI) dan pemilih waktu (BC1). Untuk periode waktu yang dikalibrasi Tk, jauh lebih besar dari T, beberapa paket diumpankan ke perangkat, pada keluarannya beberapa paket dibentuk, ini diperlukan untuk merata-ratakan hasil.
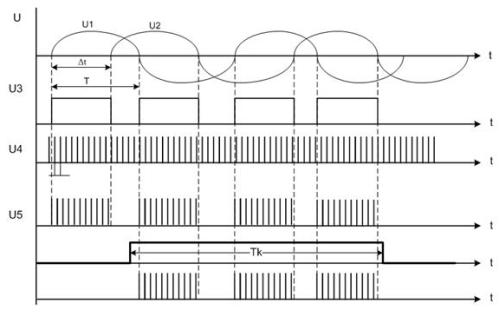
Pulsa U6 memiliki durasi kelipatan T0, karena pembentuk pulsa (PI) bekerja berdasarkan prinsip membagi frekuensi dengan faktor tertentu. Pulsa sinyal U6 membuka pemilih waktu (BC2). Akibatnya, beberapa paket tiba di inputnya. Sinyal U7 diumpankan ke counter (MF) yang terhubung ke pusat kendali pusat. Resolusi perangkat ditentukan oleh set U6.
Kesalahan pengukur fase juga dipengaruhi oleh akurasi yang buruk dalam memperbaiki pergeseran fase oleh konverter selama interval waktu momen transisi sinyal U2 dan U1 melalui nol. Tetapi ketidakakuratan ini berkurang ketika rata-rata hasil perhitungan untuk periode Tk, yang jauh lebih besar dari periode sinyal input yang dipelajari.
Kami harap artikel ini membantu Anda mendapatkan pemahaman umum tentang cara kerja pengukur fase. Anda selalu dapat menemukan informasi yang lebih terperinci dalam literatur khusus, yang untungnya, banyak sekali di Internet saat ini.