Pemilihan motor listrik untuk penggerak tambahan mesin pemotong logam
 Penggerak bantu pada peralatan mesin (penggerak cepat untuk kaliper, bantalan kepala, lengan silang, dll.) biasanya beroperasi dalam mode beban waktu singkat. Mode pengoperasian penggerak listrik dengan durasi seperti itu, di mana suhu semua perangkat yang termasuk dalam penggerak listrik tidak mencapai nilai stasioner selama pengoperasian dan turun ke suhu sekitar selama jeda, disebut jangka pendek.
Penggerak bantu pada peralatan mesin (penggerak cepat untuk kaliper, bantalan kepala, lengan silang, dll.) biasanya beroperasi dalam mode beban waktu singkat. Mode pengoperasian penggerak listrik dengan durasi seperti itu, di mana suhu semua perangkat yang termasuk dalam penggerak listrik tidak mencapai nilai stasioner selama pengoperasian dan turun ke suhu sekitar selama jeda, disebut jangka pendek.
Waktu pengoperasian penggerak tambahan pada mesin pemotong logam biasanya pendek; tidak melebihi 5 — 15 detik, dan hanya untuk mesin berat mencapai 1 — 1,5 menit. Selama waktu ini (t < 0,1T) dengan beban berlebih dalam batas yang diizinkan, motor listrik tidak memiliki waktu untuk memanas bahkan hingga panas berlebih normal. Daya pengenal motor listrik dalam hal ini ditentukan oleh kondisi kelebihan beban.
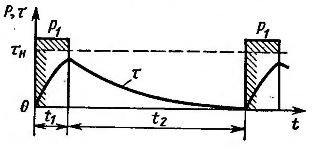
Beras. 1. Kurva beban untuk operasi jangka pendek
Momen hambatan Mc selama pengoperasian penggerak bantu diciptakan terutama oleh gaya gesek, dan oleh karena itu penggerak ini, tidak seperti penggerak gerakan utama, memerlukan torsi awal yang signifikan.
Daya yang dikonsumsi untuk mengatasi gaya gesek saat menggerakkan elemen mesin yang bergerak secara horizontal:

dimana Ftp — gaya gesekan, N; v — kecepatan, m/s; G — gravitasi (berat) unit yang dipindahkan, N; μ — koefisien gesekan gerak.
Daya poros motor P = Ptr /η,
dimana η — c. P. D. Transmisi, biasanya η = 0.1 — 0.2.
Pemanasan motor listrik selama operasi dalam mode yang dipertimbangkan tidak signifikan. Oleh karena itu, disarankan untuk menggunakan kelebihan yang diizinkan.
Nilai daya Pn = Ptr /(λη),
dimana λ — koefisien kelebihan yang diizinkan.
Secara kasar dapat dikatakan bahwa karakteristik mesin pada bagian kerjanya sudah jelas. Kemudian kecepatan sudut motor dalam operasi kelebihan beban
ωλ = ωО (1 — λсн),
dimana, ωО = (πнО)/30- kecepatan sudut sinkron motor listrik.
Dengan menggunakan rumus Pn = Ptr /(λη), temukan torsi kelebihan beban motor
Momen hambatan pada awal menghidupkan mesin lebih besar daripada saat pengoperasiannya. Saat ini
dimana μО — koefisien gesekan saat istirahat.
Prosedur pemilihan motor listrik dari penggerak bantu mesin
Pertama, dengan menggunakan rumus Pn = Ptr /(λη) motor listrik dipilih dari katalog, yang kemudian ditentukan torsi awal Mnach. Hitung momen Mso dengan rumus dan bandingkan dengan momen Mnach.Jika 0,85 Mnig > Mso, maka motor yang dipilih cocok untuk penggerak tambahan.
Penggerak untuk memutar dan mengangkat unit mesin dihitung dengan cara yang sama, hanya dalam kasus terakhir beban utama sering dibuat oleh gaya gravitasi (berat) dari unit yang dipindahkan.
Sangat penting untuk memilih kecepatan optimal untuk mendekati alat dengan cepat ke benda kerja. Saat mendekati pahat, gerakan kecepatan tinggi digantikan oleh gerakan lambat pada kecepatan potong. Perubahan kecepatan ini terjadi ketika pahat agak jauh dari bagian, jika tidak, pahat akan menabrak bagian dengan kecepatan tinggi dan patah.
Transisi dari satu kecepatan ke kecepatan lainnya membutuhkan waktu. Selama waktu ini, peralatan listrik diaktifkan dan gerakan berlanjut kecepatan tinggi... Waktu respons peralatan berubah karena fluktuasi tegangan dan pengaruh faktor acak lainnya.
Kecepatan optimal disediakan oleh pemilihan roda gigi yang tepat dalam rantai kinematik. Pengurangan waktu lebih lanjut dimungkinkan dengan pengurangan kecepatan otomatis secara bertahap atau mulus di bagian akhir jalan, yang memungkinkan untuk mengadopsi kecepatan awal yang lebih tinggi.