Peralatan listrik elevator
 Lift adalah mesin pengangkat siklik yang dirancang untuk mengangkat orang dan barang secara vertikal. Dengan penunjukan, lift dibagi menjadi penumpang, kargo-penumpang, rumah sakit, kargo.
Lift adalah mesin pengangkat siklik yang dirancang untuk mengangkat orang dan barang secara vertikal. Dengan penunjukan, lift dibagi menjadi penumpang, kargo-penumpang, rumah sakit, kargo.
Bergantung pada kecepatan mobil, elevator dibagi menjadi kecepatan rendah (hingga 0,71 m / detik), kecepatan tinggi (dari 1 hingga 1,6 m / detik), kecepatan tinggi (dari 2 hingga 4 m / detik) dan kecepatan tinggi (4 — 10 m / s) ... Kapasitas beban lift penumpang adalah dari 320 hingga 1600 kg, lift barang - dari 160-5000 kg. Pada kecepatan hingga 1,6 m / detik, motor listrik dihubungkan ke balok traksi melalui gearbox, jika kecepatannya lebih tinggi, maka digunakan penggerak listrik tanpa roda gigi.

Dengan berbagai macam pilihan desain untuk lift penumpang dan barang, perangkat utama untuk mereka adalah kerekan, tali, mobil, penyeimbang, rem mekanis, dan peralatan kontrol. Lift modern memiliki sistem suspensi penyeimbang dan tali penyeimbang.

Kabin bergerak di sepanjang rel vertikal.Kabin digantung dari tali yang mengelilingi kawat penarik dan memandu katrol penggerak winch listrik. Di ujung tali ada penyeimbang yang bergerak di sepanjang pemandu. Massa penyeimbang sama dengan jumlah massa kabin dan (0,42 — 0,5) massa beban (atau setengah dari beban kabin yang paling mungkin).
Penggerak lift
Di elevator dan elevator barang, jenis penggerak listrik dipilih tergantung pada kecepatan pergerakan, jumlah lantai bangunan, dan akurasi pengereman yang diperlukan. Penggerak listrik berikut ini sedang digunakan:
a) untuk bangunan hingga 17 lantai, lift kecepatan rendah dan kecepatan tinggi dengan kecepatan 0,7 hingga 1,4 m / s dengan kapasitas beban 320.400 kg digunakan. Lift ini menggunakan penggerak listrik dengan motor listrik dua kecepatan asinkron dengan rotor di dalam sangkar tupai,
b) untuk lift penumpang berkecepatan tinggi dengan kecepatan 1,6 m / s, dimaksudkan untuk bangunan hingga 25 lantai, penggerak listrik sesuai dengan sistem pengatur tegangan thyristor (TRN) dengan motor asinkron dua kecepatan (TRN-ADD ) digunakan.

Kehadiran penggerak listrik yang dapat disetel memastikan kelancaran proses akselerasi dan deselerasi yang tinggi, akurasi berhenti yang tinggi di lantai (hingga 20 mm) dan tidak adanya bagian dengan kecepatan rendah sebelum berhenti. Gulungan kedua motor digunakan untuk mencapai kecepatan rendah selama perombakan,
c) untuk elevator berkecepatan tinggi dan berkecepatan tinggi, penggerak listrik konstan sesuai dengan sistem motor konverter thyristor-TP-D dan arus bolak-balik sesuai dengan sistem motor listrik asinkron sirkuit pendek konverter frekuensi GGCH-AD digunakan.
Penggerak listrik thyristor dari elevator tipe ULMP-25-16
Catu daya penggerak listrik (Gbr. 1) dilakukan oleh pengatur tegangan thyristor UZ (TRN) yang dapat dibalik saat start-up dan gerakan seragam dan oleh penyearah terpisah yang dirakit sesuai dengan rangkaian jembatan fase tunggal UZ1 untuk menyalakan belitan stator selama pengereman dinamis.
Sistem menyediakan kontrol fase parametrik dari kecepatan rotasi motor induksi sangkar-tupai. Sistem kontrol otomatis dibuat pada komputer mikro chip tunggal tipe KR1816VB031, yang melakukan kontrol digital langsung dari kecepatan putaran motor listrik asinkron dua kecepatan.
Sistem kontrol otomatis memastikan akurasi tinggi dalam mempertahankan kecepatan yang disetel dan berhenti di tingkat lantai yang diperlukan langsung ke titik setel tanpa bagian dengan kecepatan yang dikurangi. Belitan kedua motor dihidupkan hanya selama perombakan.
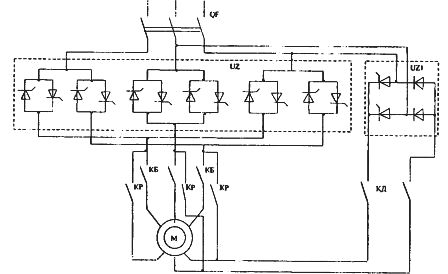
Beras. 1. Skema penggerak listrik thyristor dari elevator
Solenoid rem
Mekanisme pengangkatan elevator dilengkapi dengan perangkat pengereman khusus dengan elektromagnet arus searah short-stroke dan short-stroke, yang terhubung ke jaringan 220 atau 380 V melalui penyearah.
Perangkat kontrol lift
Sakelar lantai dirancang untuk mengganti sirkuit kontrol gerak. Mereka mencatat posisi mobil, secara otomatis memilih arah gerakan ("naik" atau "turun") dan memberikan perintah untuk mematikan penggerak listrik saat melakukan pengereman.Secara struktural, ini adalah sakelar tuas tiga titik tiga posisi (1-0-2) (perangkat kontrol gerak) yang memiliki kontak yang dapat digerakkan (pada tuas) ke kontak tetap (pada bodi).
Sakelar lantai dipasang di poros setinggi lantai dan ada cabang cetakan di kabin yang bekerja pada tuas sakelar lantai.
Saat kabin bergerak "naik" dengan memutar tuas, satu grup kontak tetap menutup, dan "turun" - grup lainnya. Saat mobil berada di lantai, sakelar lantai berada di posisi netral «O» dan kontak tetap terbuka.

Sakelar kecepatan dirancang untuk memberikan dorongan untuk mengurangi kecepatan sebelum menghentikan kendaraan. Mereka digunakan dalam elevator berkecepatan tinggi dengan penggerak listrik dengan eksekusi dua kecepatan. Mereka dibangun berdasarkan prinsip sakelar lantai, tetapi memiliki desain yang berbeda. Sakelar kecepatan dipasang di poros tambang sebagai satu set lengkap di atas dan di bawah lantai pada jarak 0,5 hingga 0,6 m.
Sakelar tuas dirancang untuk mengoperasikan lift barang yang dikendalikan. Secara struktural, ini adalah sakelar tuas tiga posisi dengan pegangan yang dapat dikembalikan sendiri ke posisi netral ("atas" -0- "bawah"), dipasang di kabin. Dengan memutar pegangan, arah gerakan dipilih, yang dicapai dengan menutup sepasang kontak tetap. Saat pegangan dilepas, kontak terbuka dan motor berhenti (mati). Sakelar digunakan secara bersamaan sebagai sakelar batas di posisi ujung kabin. Ini dicapai dengan aksi tuas pada roller pemandu khusus di poros tambang.
Sensor induktif dirancang untuk digunakan pada elevator berkecepatan tinggi. Diagram sensor tersebut untuk arus bolak-balik dan diperbaiki ditunjukkan pada Gambar. 2.
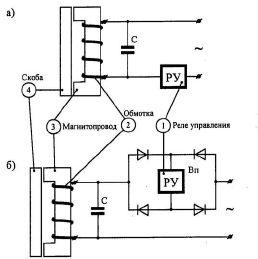
Beras. 2. Diagram skematis sensor induktif arus bolak-balik (a) dan diperbaiki (b).
Sirkuit magnet laminasi berbentuk U yang terbuat dari baja 3 dipasang di poros tambang, dan ada braket baja 4 di kabin, yang merupakan shunt magnet. Di sirkuit magnetik ada koil dengan belitan 2, yang dihubungkan langsung ke relai kontrol 1 atau melalui penyearah Vp. Saat klem keluar (sirkuit magnetik terbuka), resistansi induktif koil kecil, yang akan memastikan pengoperasian relai kontrol. Jika braket baja tumpang tindih dengan sirkuit magnetik, resistansi induktif koil naik tajam dan relai dilepaskan.
Keandalan dan kejelasan pengoperasian relai kontrol dipastikan dengan dimasukkannya kapasitansi C secara paralel dengan koil, yang dipilih dari kondisi memperoleh mode yang dekat dengan resonansi arus. Penggunaan penyearah untuk menyalakan relai kontrol meningkatkan keandalan pengoperasian sistem magnetik relai.
Selain itu, perangkat kontak kedap udara (saklar buluh) banyak digunakan dalam sensor perjalanan. Penggunaan sensor induktif menghilangkan kerugian seperti sakelar lantai dan sakelar kecepatan seperti gangguan kebisingan dan radio yang timbul dari pengoperasian perangkat kontak.
Pelapisan magnetik adalah perangkat elektromagnetik yang dipasang di kabin dan mengendalikan pengoperasian kunci pintu tambang. Pembatas cabang magnetik terhubung ke angker elektromagnet cabang.Saat kabin berada di lantai, elektromagnet cabang dide-aerasi, penahan pegas melepaskan kait kunci pintu tambang, memungkinkannya terbuka.
Saat bergerak, elektromagnet cabang diberi energi - kait dimasukkan, yang melarang pembukaan pintu. Kunci semacam itu digunakan pada elevator desain lama (atau dimodernisasi) dengan pengoperasian pintu poros manual.

Otomatisasi elevator
Perbedaan utama antara pengoperasian elevator dan hoist adalah posisi multi-posisinya, yang dinyatakan dalam fakta bahwa mekanisme tersebut dapat menempati sejumlah besar posisi tetap. Oleh karena itu, setelah setiap perhentian, perlu untuk memecahkan masalah logis dalam memilih langkah selanjutnya. Solusi untuk masalah ini saat ini diimplementasikan menggunakan chip logika dan mikroprosesor. Tugas-tugas berikut ditetapkan untuk skema kontrol lift: kontrol posisi mobil di poros, pemilihan arah gerakan secara otomatis, penentuan waktu mulai berhenti, penghentian mobil secara akurat di lantai, pembukaan otomatis dan penutupan pintu dan perlindungan penggerak listrik dan lift.
Sinyal perintah yang mengatur program gerak mobil dibagi menjadi dua jenis: "perintah" yang datang dari mobil dan "panggilan" yang datang dari landasan pendaratan. Perintah diberikan melalui tombol yang masing-masing terletak di area kokpit dan lantai. Bergantung pada respons terhadap perintah dan metode pemrosesannya, skema kontrol terpisah dan kolektif berbeda.Dengan prinsip kontrol terpisah, sirkuit menerima dan menjalankan hanya satu perintah dan selama pelaksanaannya tidak menanggapi perintah dan panggilan lainnya.
Skema ini adalah yang paling sederhana untuk diterapkan, tetapi membatasi kemungkinan karakteristik elevator dan oleh karena itu hanya digunakan untuk elevator di bangunan tempat tinggal hingga setinggi sembilan lantai dengan arus penumpang yang relatif kecil. Dengan prinsip kontrol kolektif, sirkuit menerima beberapa perintah secara bersamaan dan menjalankannya dalam urutan tertentu, biasanya dalam urutan lantai.

Dasar dari sistem kontrol elevator adalah pengukuran jam lantai. Studi jam bisa menjadi pendulum, ketika pemasangan dilakukan dalam dua arah, dari bawah ke atas dan dari atas ke bawah, dan dalam satu arah, misalnya hanya dari atas ke bawah. Ayunan pendulum lebih sering digunakan.