Karakteristik mekanis motor induksi pada mode, voltase, dan frekuensi yang berbeda
 Karakteristik mekanis motor induksi dapat dinyatakan sebagai n = f (M) atau n=e(I). Namun, karakteristik mekanis motor asinkron sering dinyatakan dalam bentuk ketergantungan M = f(S), di mana C — meluncur, S = (nc-n) / nc, di mana ns — kecepatan sinkron.
Karakteristik mekanis motor induksi dapat dinyatakan sebagai n = f (M) atau n=e(I). Namun, karakteristik mekanis motor asinkron sering dinyatakan dalam bentuk ketergantungan M = f(S), di mana C — meluncur, S = (nc-n) / nc, di mana ns — kecepatan sinkron.
Dalam praktiknya, rumus sederhana yang disebut rumus Kloss digunakan untuk konstruksi grafis dari karakteristik mekanis:

di sini: Mk — nilai torsi kritis (maksimum). Nilai momen ini sesuai dengan slip kritis

dimana λm = Mk / Mn
Rumus Kloss digunakan untuk memecahkan masalah yang berkaitan dengan penggerak listrik yang dilakukan dengan menggunakan motor induksi. Dengan menggunakan rumus Kloss, Anda dapat membuat grafik karakteristik mekanis sesuai dengan data paspor motor induksi. Untuk perhitungan praktis, hanya tanda tambah yang harus diperhitungkan dalam rumus saat menentukan momen kritis sebelum akar.
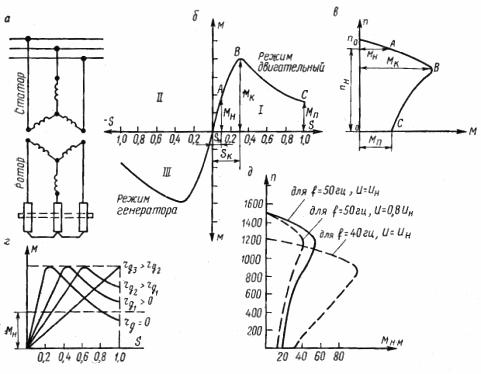
Beras. 1.Motor asinkron: a — diagram skematik, b — karakteristik mekanis M = f (S) — alami dalam mode motor dan generator, c — karakteristik mekanis alami n = f (M) dalam mode motor, d — karakteristik mekanis dari rheostat buatan , e — karakteristik mekanis untuk voltase dan frekuensi yang berbeda.

Motor induksi sangkar tupai
Seperti dapat dilihat dari gambar. 1, karakteristik mekanik motor induksi yang terletak di kuadran I dan III. Bagian kurva di kuadran I sesuai dengan nilai slip positif dan mencirikan mode operasi motor asinkron, dan di kuadran III, mode generator. Mode mesin adalah minat praktis terbesar.
Grafik karakteristik mekanis mode motor berisi tiga titik karakteristik: A, B, C dan dapat dibagi secara kondisional menjadi dua bagian: OB dan BC (Gbr. 1, c).
Titik A sesuai dengan torsi nominal motor dan ditentukan dengan rumus Mn = 9.55•103•(Strn /nn)
Momen ini sesuai slip nominal, yang untuk mesin dengan aplikasi industri umum memiliki nilai dalam kisaran dari 1 hingga 7%, yaitu Sn = 1 — 7%. Pada saat yang sama, mesin kecil memiliki lebih banyak selip dan mesin besar memiliki lebih sedikit.
Motor selip tinggi yang ditujukan untuk beban kejut memiliki Сn~15%. Ini termasuk, misalnya, motor AC seri tunggal.
Titik C dari karakteristik sesuai dengan nilai torsi awal yang terjadi pada poros motor saat start-up. Momen Mp ini disebut awal atau awal. Dalam hal ini, slip sama dengan satu dan kecepatannya nol. Torsi awal mudah ditentukan dari data tabel referensi, yang menunjukkan rasio torsi awal dengan nominal Mp / Mn.
Besarnya torsi awal pada tegangan dan frekuensi arus nilai konstan tergantung pada resistansi aktif di sirkuit rotor. Dalam hal ini, awalnya ketika resistansi aktif meningkat, nilai torsi awal meningkat, mencapai maksimum ketika resistansi aktif rangkaian rotor sama dengan resistansi induktif total motor. Selanjutnya, ketika resistansi aktif rotor meningkat, nilai torsi awal menurun, cenderung nol pada batasnya.
Titik C (Gbr. 1, b dan c) sesuai dengan momen maksimum yang dapat mengembangkan mesin di seluruh rentang putaran dari n = 0 hingga n = ns... Momen ini disebut momen kritis (atau terbalik) Mk . Momen kritis juga sesuai dengan slip kritis Sk. Semakin kecil nilai slip kritis Sk, serta nilai slip nominal Сn, semakin besar kekakuan karakteristik mekaniknya.
Momen awal dan kritis ditentukan oleh momen nominal. Menurut GOST untuk mesin listrik motor sangkar tupai, kondisi Mn / Mn = 0,9 — 1,2, Mk / Mn = 1,65 — 2,5 harus dipenuhi.
Perlu dicatat bahwa nilai momen kritis tidak bergantung pada resistansi aktif rangkaian rotor, sedangkan slip kritis Сk berbanding lurus dengan resistansi ini.Artinya dengan peningkatan resistansi aktif rangkaian rotor, nilai momen kritis tetap tidak berubah, tetapi kurva torsi maksimum bergeser ke peningkatan nilai slip (Gbr. 1, d).
Besarnya torsi kritis berbanding lurus dengan kuadrat tegangan yang diberikan pada stator dan berbanding terbalik dengan kuadrat frekuensi tegangan dan frekuensi arus dalam stator.
Jika, misalnya, tegangan yang disuplai ke motor sama dengan 85% dari nilai pengenal, maka besarnya torsi kritis adalah 0,852 = 0,7225 = 72,25% torsi kritis pada tegangan pengenal.
Kebalikannya diamati ketika mengubah frekuensi. Jika, misalnya, untuk motor yang dirancang untuk beroperasi dengan frekuensi arus = 60 Hz, arus suplai dengan frekuensi = 50 Hz, maka momen kritis akan datang pada (60/50)2=1,44 kali lebih besar dari nilai resmi frekuensinya (Gbr. 1, e).
Momen kritis mencirikan kapasitas kelebihan beban sesaat dari motor, yaitu, ini menunjukkan momen kelebihan beban apa (dalam beberapa detik) yang dapat ditahan motor tanpa konsekuensi yang berbahaya.

Bagian karakteristik mekanis dari nol hingga nilai maksimum (kritis) (lihat Gbr. 1, biv) disebut bagian stabil dari karakteristik, dan bagian BC (Gbr. 1, c) — bagian yang tidak stabil.
Pembagian ini dijelaskan oleh fakta bahwa pada bagian karakteristik OF yang meningkat dengan meningkatnya slip, yaitu. saat kecepatan menurun, torsi yang dikembangkan oleh mesin meningkat.Ini berarti bahwa ketika beban meningkat, yaitu ketika torsi pengereman meningkat, kecepatan putaran motor berkurang, dan torsi meningkat karenanya. Saat beban berkurang, sebaliknya, kecepatan bertambah dan torsi berkurang. Saat beban berubah sepanjang rentang karakteristik bagian stabil, kecepatan rotasi dan torsi motor berubah.
Motor tidak dapat berkembang lebih dari torsi kritis, dan jika torsi pengereman lebih besar, motor pasti akan berhenti. Mesin terguling terjadi, seperti yang mereka katakan.
Karakteristik mekanis pada U dan I konstan dan tidak adanya resistansi tambahan pada rangkaian rotor disebut karakteristik alami (karakteristik motor induksi sangkar-tupai dengan rotor belitan tanpa resistansi tambahan pada rangkaian rotor). Karakteristik buatan atau rheostatik disebut yang sesuai dengan resistansi tambahan di sirkuit rotor.
Semua nilai torsi awal berbeda dan bergantung pada resistansi aktif rangkaian rotor. Slider dengan besaran berbeda sesuai dengan torsi nominal yang sama Mn. Ketika resistansi sirkuit rotor meningkat, slip meningkat dan karenanya kecepatan motor berkurang.
Karena dimasukkannya resistansi aktif di sirkuit rotor, karakteristik mekanis di bagian stabil diregangkan ke arah peningkatan slip, sebanding dengan resistansi.Ini berarti kecepatan motor mulai bervariasi secara signifikan tergantung pada beban poros dan karakteristik keras menjadi lunak.