Penggerak listrik dengan kaskade katup asinkron
 Dalam industri, penggerak dengan rentang penyesuaian kecepatan yang dangkal (3:2:1) digunakan, yaitu yang disebut kaskade katup, dibangun berdasarkan motor listrik asinkron dan merupakan sistem penggerak variabel yang dapat disesuaikan.
Dalam industri, penggerak dengan rentang penyesuaian kecepatan yang dangkal (3:2:1) digunakan, yaitu yang disebut kaskade katup, dibangun berdasarkan motor listrik asinkron dan merupakan sistem penggerak variabel yang dapat disesuaikan.
Tidak seperti pengaturan throttle dan frekuensi, dengan koneksi kaskade, motor listrik asinkron terhubung ke jaringan suplai arus bolak-balik tiga fase. Ini adalah keuntungan besar dari sistem penggerak ini dibandingkan dua yang pertama. Ini juga memiliki efisiensi yang lebih tinggi daripada semua sistem lainnya. Keuntungan ini dapat dijelaskan dengan fakta bahwa dalam sistem kaskade hanya energi slip yang diubah, sedangkan pada penggerak DC dan sistem frekuensi variabel, seluruh jumlah energi yang dikonsumsi oleh motor dapat diubah.
Dibandingkan dengan aktuator throttle dan rheostat, serta cengkeraman selip, di mana energi selip hilang oleh mereka dalam tahanan, keuntungan kaskade katup dalam hal energi bahkan lebih tinggi.Konverter di sirkuit rotor sistem ini hanya berfungsi untuk kontrol kecepatan. Drive, dibuat menggunakan motor asinkron, memungkinkan Anda membuat sistem berkecepatan tinggi dengan daya variabel. Sistem seperti itu memberikan kontrol kecepatan dan torsi yang mulus, tidak memerlukan banyak daya dan peralatan kontak.
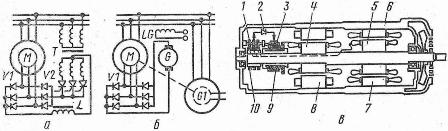
Beras. 1. Skema kaskade: a — katup, b — mesin katup, c — mesin katup satu bodi
Kaskade katup juga memiliki daya kontrol yang rendah, mudah diotomatisasi, dan memiliki sifat dinamis yang baik.
Perlu dicatat bahwa dalam kaskade katup, konverter frekuensi dari rangkaian rotor tidak mengedarkan daya reaktif untuk membuat putaran fluks magnet motor induksi, karena fluks ini dihasilkan oleh daya reaktif yang memasuki rangkaian stator.
Selain itu, konverter yang digunakan pada tahap katup hanya dirancang untuk daya yang sebanding dengan rentang kendali yang diberikan. Pada saat yang sama, dalam sistem dengan kontrol frekuensi, konverter terlibat dalam pembuatan fluks magnet, dan dalam desainnya perlu memperhitungkan kekuatan penuh drive. Sirkuit tahap katup yang paling sederhana adalah sirkuit dengan sirkuit DC perantara dan konverter EMF katup.
Dalam sirkuit katup (Gbr. A) dan kaskade mesin-katup (Gbr. B), arus rotor diperbaiki sesuai dengan sirkuit jembatan tiga fase, dan EMF tambahan dimasukkan ke dalam sirkuit arus yang diperbaiki di rumahan pertama oleh konverter katup, dan yang kedua — dari mesin DC. Sirkuit yang ditunjukkan pada gambar. a, terdiri dari motor induksi M dengan rotor fase.
Konverter katup V1 termasuk dalam sirkuit rotor, di mana arus AC rotor diperbaiki.Dengan konverter katup, inverter (konverter katup V2) dihidupkan melalui throttle L, yang merupakan sumber EMF tambahan. Konverter katup V2 dirakit dengan transformator T menurut sirkuit netral tiga fase. Biasanya digunakan pada perangkat kecil.
Dalam diagram ini, fungsi dari dua konverter katup digambarkan dengan jelas.Di sini katup VI bertindak sebagai penyearah, mengubah frekuensi slip arus bolak-balik rotor menjadi arus searah. Katup V2 mengubah arus rotor berdiri menjadi arus bolak-balik pada frekuensi jaringan, yaitu bekerja dalam mode inverter dependen.
Dalam kaskade mesin-katup (Gbr. C), konversi arus rotor yang diperbaiki oleh konverter katup V1 menjadi arus bolak-balik dengan frekuensi jaringan terjadi dengan bantuan mesin arus searah G dan generator sinkron G1 . Di sirkuit ini, mesin G dan G1 berperan sebagai inverter.
Berbagai skema kaskade katup asinkron telah dikembangkan, tetapi skema dasar dan paling umum ditunjukkan pada Gambar. Yang menarik adalah penutup tunggal AMVK-13-4 dengan daya 13 kW. Dalam satu kasus, motor induksi dengan rotor fase, mesin DC, dan grup rotor dari katup yang tidak terkontrol ditempatkan pada kaskade tersebut.
Perangkat ini adalah motor AC dengan pengaturan kecepatan stepless. Perangkat ini dapat mengatasi kelebihan beban yang signifikan. Kaskade memiliki kecepatan nominal 1400 mnt-1, tegangan suplai 380 V dan rentang penyesuaian 1400-650 mnt-1 tanpa mengganti sirkuit stator.
Saat mengganti belitan stator dari bintang ke delta, rentang kendali akan menjadi 1400-400 mnt-1, torsi konstan, berat unit 360 kg, tegangan eksitasi 220 V.Perangkat ini memiliki konstruksi tiup yang terlindungi. Unit-unit ini berlaku di unit penggerak.
Susunan skema kaskade mesin-katup dengan satu badan ditunjukkan pada Gambar. ay. Rotor 5 dari motor listrik asinkron dan angker 4 dari mesin DC dipasang pada satu poros. Di tempat tidur silinder baja biasa 6, stator 7 dari motor listrik asinkron dan kutub 8 dari mesin DC dipasang. Kolektor 9 dan cincin geser 10, sikat kolektor 3 dan sikat 1 dari motor asinkron dihubungkan melalui penyearah silikon 2. Untuk menghilangkan panas dari mesin, terutama pada kecepatan rendah, terdapat saluran ventilasi khusus di rotor dan di rangka.
Penyearah jembatan yang memasok tegangan rotor yang diperbaiki ke angker mesin DC dirakit dari enam katup VK-50-1.5 dengan tegangan balik 150 V. di mana penghematan energi sangat penting.
Seiring dengan keuntungan yang dijelaskan dari sistem yang dipertimbangkan, perlu dicatat kerugiannya: tingginya biaya konverter katup dan penggerak katup-mesin, faktor daya rendah, efisiensi rendah dibandingkan dengan motor asinkron karena fakta bahwa penggerak bekerja dengan kecepatan maksimum tanpa hubung singkat dari motor belitan rotor, kapasitas beban berlebih yang rendah dari motor induksi, penggunaan motor penggerak yang rendah (sekitar 5-7%), kebutuhan akan sarana start khusus yang memberikan karakteristik start dengan kontrol kecepatan yang dangkal .