Pemilihan motor untuk elevator dan mesin pengangkat dengan tenaga
 Lift penumpang dan barang modern dari bangunan tempat tinggal dan administrasi, serta beberapa mesin untuk mengangkat tambang, dilakukan dengan penyeimbang atau, kadang-kadang disebut, dengan penyeimbang. Dalam mesin pertambangan, penyeimbangan, seperti yang telah disebutkan, sering dilakukan bukan dengan penyeimbang, tetapi dengan kapal pengangkat kedua.
Lift penumpang dan barang modern dari bangunan tempat tinggal dan administrasi, serta beberapa mesin untuk mengangkat tambang, dilakukan dengan penyeimbang atau, kadang-kadang disebut, dengan penyeimbang. Dalam mesin pertambangan, penyeimbangan, seperti yang telah disebutkan, sering dilakukan bukan dengan penyeimbang, tetapi dengan kapal pengangkat kedua.
Penyeimbang untuk elevator dipilih untuk menyeimbangkan berat kapal pengangkat (mobil) dan bagian dari beban nominal yang akan diangkat:

di mana GH adalah berat beban angkat nominal, N; G0 — berat kabin, N; Gnp adalah berat penyeimbang, N; α adalah faktor penyeimbang, biasanya diambil sama dengan 0,4-0,6.
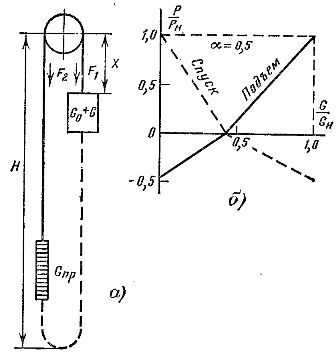
Beras. 1. Untuk menghitung beban pada poros motor elevator.
Kebutuhan untuk menyeimbangkan kapal yang berat sudah jelas, karena untuk memindahkannya tanpa adanya penyeimbang, diperlukan peningkatan tenaga mesin yang sesuai. Kemampuan untuk menyeimbangkan sebagian muatan pengenal terungkap saat menentukan daya ekivalen untuk kurva beban tertentu.Tidak sulit untuk mengikuti, misalnya, jika elevator bekerja terutama untuk menaikkan beban dan menurunkan mobil kosong, maka tenaga mesin yang setara menurut diagram beban minimal pada α = 0,5.
Kehadiran penyeimbang menyebabkan perataan kurva beban mesin, yang mengurangi pemanasannya selama pengoperasian. Mengacu pada diagram yang ditunjukkan pada Gambar. 1, a, lalu dengan nilai bobot penyeimbang

dan tidak adanya tali penyeimbang dan gesekan kabin serta penyeimbang pada pemandu, Anda dapat menulis:


dimana gk adalah berat tali 1 m, N/m.
Daya tarik

Torsi dan daya poros motor ditentukan berdasarkan rumus berikut:
di mana M1, P1 — torsi dan tenaga saat drive beroperasi dalam mode motor, masing-masing Nm dan kW; M2, P2 — torsi dan daya saat penggerak beroperasi dalam mode generator, masing-masing Nm dan kW; η1, η2 — efisiensi roda gigi cacing dengan transfer energi langsung dan mundur.
Nilai η1 dan η2 secara nonlinier bergantung pada kecepatan poros cacing dan dapat dihitung dengan rumus

di sini λ adalah sudut pendakian garis spiral pada silinder pengindeksan cacing; k1 adalah koefisien yang memperhitungkan kerugian pada bantalan dan rendaman oli dari kotak roda gigi; ρ — sudut gesekan, tergantung pada kecepatan putaran poros cacing.
Dari rumus gaya pada traksi sheave, dapat disimpulkan bahwa dengan tidak adanya tali penyeimbang, beban pada penggerak listrik winch pengangkat tergantung pada posisi kapal pengangkat.
Karena kapasitas muatnya yang besar - hingga 10 ton, kecepatan gerakan yang tinggi - 10 m / s dan lebih, ketinggian angkat yang tinggi 200-1000 m dan kondisi kerja yang keras, mesin pengangkat tambang dilengkapi dengan tali baja dengan massa besar. Bayangkan, misalnya, satu lintasan diturunkan ke cakrawala bawah, sementara yang lain di atas, dan pada saat itu muatannya diturunkan. Pada posisi ini, seluruh tali kepala tidak seimbang, dan pada awal pendakian motor harus mengatasi momen statis yang ditimbulkan oleh beban beban dan tali. Menyeimbangkan tali terjadi di tengah jalur lompatan. Kemudian putus lagi dan beban dari bagian tali yang turun akan membantu menurunkan beban mesin.
Pembebanan yang tidak merata, terutama di tambang yang dalam, menyebabkan kebutuhan untuk melebih-lebihkan tenaga mesin, oleh karena itu pada ketinggian pengangkatan lebih dari 200-300 m disarankan untuk menyeimbangkan tali pengangkat kepala dengan bantuan tali ekor yang digantung dari kapal pengangkat. Biasanya, tali ekor dipilih dengan penampang dan panjang yang sama dengan yang utama, sehingga sistem pengangkatan menjadi seimbang.
Karena beban berubah selama pengoperasian elevator dan mesin pengangkat, untuk menentukan daya atau momen poros motor untuk setiap beban, akan lebih mudah untuk membuat grafik ketergantungan nilai-nilai ini pada beban. di beberapa titik, yang kira-kira memiliki karakter yang sama seperti yang ditunjukkan pada gambar. 1b dan kemudian menggunakannya dalam membuat diagram beban.
Dalam hal ini, mode operasi penggerak listrik dari mesin pengangkat harus diketahui, yang sangat ditentukan oleh durasi relatif dari aktivasi PV dan jumlah penyalaan motor per jam. Untuk elevator, misalnya, mode pengoperasian penggerak listrik ditentukan oleh tempat pemasangan dan tujuan elevator.
Di bangunan tempat tinggal, jadwal lalu lintas relatif seragam, dan durasi relatif — PV dan frekuensi start motor h masing-masing sama dengan 40% dan 90-120 start per jam. Di gedung perkantoran bertingkat tinggi, beban lift meningkat tajam selama jam kedatangan dan keberangkatan karyawan dari tempat kerja dan, karenanya, selama istirahat makan siang, nilai tinggi akan memiliki PV dan h-40-60% dan 150 -200 dimulai per jam.
Setelah menggambar selesai beban statis pada poros motor, sistem penggerak listrik dan motor hoist telah dipilih, tahap kedua pembuatan diagram beban dapat dilakukan — dengan mempertimbangkan efek transien pada diagram beban.
Untuk membuat diagram beban yang lengkap, perlu memperhitungkan waktu akselerasi dan deselerasi penggerak listrik, waktu buka tutup pintu, jumlah berhenti selama pergerakan mobil, waktu masuk dan keluar penumpang selama siklus kerja yang paling khas. Untuk elevator dengan pintu yang dioperasikan secara otomatis, total kehilangan waktu yang ditentukan oleh pengoperasian pintu dan pengisian gerbong adalah 6-8 detik.
Waktu percepatan dan perlambatan mobil dapat ditentukan dari diagram gerak jika diketahui kecepatan nominal mobil dan nilai percepatan (perlambatan) dan sentakan yang diperbolehkan. Menurut diagram beban, yang dibangun sesuai dengan mode statis dan dinamis yang ditunjukkan dari sistem penggerak listrik, perlu dilakukan perhitungan komputasi motor saat dipanaskan, menggunakan salah satu metode terkenal: kerugian rata-rata atau nilai yang setara.
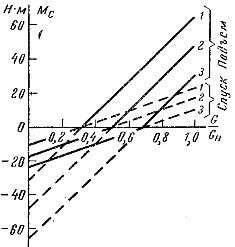
Beras. 2. Ketergantungan torsi penggerak listrik pada beban mobil, elevator, saat yang terakhir berada di lantai pertama (1), di tengah poros (2) dan di lantai terakhir (3).

Sebuah contoh. Menurut data teknis lift penumpang berkecepatan tinggi, tentukan momen statis pada poros motor dalam mode operasi yang berbeda.
Diberikan:
• kapasitas beban maksimum Gn = = 4900 N;
• kecepatan gerakan v = 1 m / s;
• tinggi angkat H = = 43 m;
• berat kabin G0 = 6860 N;
• bobot penyeimbang Gnp = 9310 N;
• diameter balok traksi Dm = 0,95 m;
• rasio transmisi gearbox winch i = 40;
• efisiensi transmisi, memperhitungkan gesekan kabin pada pemandu poros η = 0,6;
• berat tali GKAH = 862 N.
Tabel 1

Daya tarik:


Saat sistem elevator bekerja, saat Fc > 0, mesin listrik penggerak bekerja dalam mode motor, dan saat Fc 0, dan dalam mode motor saat Fc < 0.
Hasil perhitungan momen statis menurut rumus dirangkum dalam sebuah tabel. 1 dan ditunjukkan dalam grafik gambar. 2.Perhatikan bahwa perhitungan yang lebih akurat harus memperhitungkan resistensi terhadap pergerakan pemandu poros, yaitu 5-15% dari Fc.