Diagram koneksi sensor
Diagram koneksi sensor, lebih sering disebut sirkuit pengukur, dirancang untuk mengubah nilai keluaran sensor, dan dalam banyak kasus ini adalah perubahan resistansi internalnya, menjadi nilai yang lebih nyaman untuk penggunaan selanjutnya. Sebagai aturan, ini adalah arus listrik atau perubahan voltase yang dapat ditentukan secara langsung menggunakan alat pengukur listrik atau, setelah diperkuat, diumpankan ke aktuator atau alat perekam yang sesuai.

Untuk tujuan ini, skema switching berikut banyak digunakan:
-
konsisten,
-
trotoar,
-
diferensial,
-
Sebagai pengganti.
Diagram rangkaian berurutan terdiri dari sumber DC atau AC, sensor Rx itu sendiri, alat pengukur atau mekanisme penggerak langsung, dan biasanya resistansi Rd tambahan yang membatasi arus di sirkuit ini (Gbr. 1). Sirkuit switching seperti itu paling sering digunakan secara luas hanya dengan sensor kontak yang Rx = 0 atau Rx = ?.
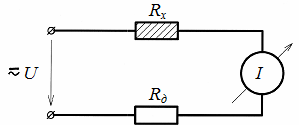
Beras. 1. Rangkaian serial untuk menghubungkan sensor
Karena saat bekerja dengan sensor lain di rangkaian alat pengukur, arus listrik yang ditentukan oleh ekspresi I = U /(Rx + Rd) selalu mengalir, dan sedikit perubahan pada resistansi internal sensor menyebabkan perubahan yang sangat kecil dalam arus ini. Akibatnya, bagian minimum skala alat pengukur digunakan, dan keakuratan pengukuran praktis dikurangi menjadi nol. Oleh karena itu, untuk sebagian besar sensor lainnya, sirkuit pengukur khusus digunakan, yang secara signifikan meningkatkan sensitivitas dan keakuratan pengukuran.
Paling umum digunakan sirkuit jembatan switching, di mana satu dan terkadang beberapa sensor dihubungkan dengan cara tertentu bersama dengan resistor tambahan dalam segi empat (yang disebut Jembatan Winston), yang memiliki dua diagonal (Gbr. 2). Salah satunya, disebut diagonal daya a-b, dirancang untuk menghubungkan sumber DC atau AC, dan yang lainnya, diagonal pengukur c-d, termasuk alat pengukur.
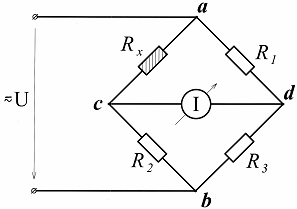
Beras. 2. Sirkuit jembatan untuk menghubungkan sensor
Jika produk dari nilai resistansi sisi berlawanan dari segiempat (lengan jembatan) sama Rx x R3 = R1NS R2, potensi titik c dan d akan sama dan tidak akan ada arus dalam diagonal pengukuran. Keadaan rangkaian jembatan ini biasa disebut keseimbangan jembatan, yaitu rangkaian jembatan seimbang.
Jika resistansi sensor Rx berubah karena pengaruh eksternal, maka keseimbangan akan terganggu dan arus sebanding dengan perubahan resistansi ini akan mengalir melalui alat pengukur. Dalam hal ini, arah arus ini menunjukkan bagaimana resistansi sensor telah berubah (naik atau turun).Di sini, dengan pilihan sensitivitas alat pengukur yang tepat, semuanya skala kerja.
Sirkuit jembatan yang sedang dipertimbangkan disebut tidak seimbang, karena proses pengukuran berlangsung di ketidakseimbangan jembatan, yaitu ketidakseimbangan. Sirkuit jembatan yang tidak seimbang paling sering digunakan dalam kasus di mana resistansi sensor di bawah pengaruh gaya eksternal dapat berubah dengan sangat cepat per unit waktu, tetapi alih-alih alat pengukur, lebih baik menggunakan alat perekam yang akan merekam ini. perubahan.
Itu dianggap lebih sensitif rangkaian jembatan seimbang, di mana rheostat pengukur khusus R (Gbr. 3), dilengkapi dengan skala dan disebut rheochord dalam teknik pengukuran, juga dihubungkan ke dua lengan yang berdekatan.
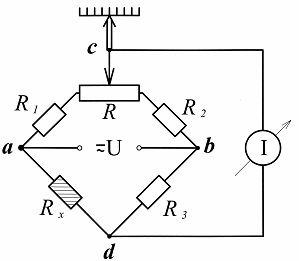
Beras. 3. Rangkaian jembatan seimbang
Saat bekerja dengan sirkuit seperti itu, dengan setiap perubahan resistansi sensor, sirkuit jembatan harus diseimbangkan kembali dengan penggeser yang disertakan, mis. sementara tidak ada arus pada diagonal pengukur. Dalam hal ini, nilai parameter yang diukur (perubahan nilai resistansi sensor) ditentukan oleh skala khusus yang dilengkapi dengan catatan ini dan dikalibrasi dalam satuan nilai yang diukur oleh sensor.
Keakuratan yang lebih tinggi dari jembatan seimbang dijelaskan oleh fakta bahwa lebih mudah untuk menentukan kekurangan arus pada alat pengukur daripada mengukur nilainya secara langsung, dan menyeimbangkan jembatan dalam kasus seperti itu, biasanya dilakukan dengan menggunakan motor listrik khusus yang dikendalikan oleh sinyal ketidakseimbangan sirkuit jembatan.
Sirkuit jembatan untuk sensor switching dianggap universal, karena dapat ditenagai oleh arus searah dan bolak-balik, dan yang terpenting, beberapa sensor dapat dihubungkan ke sirkuit ini secara bersamaan, yang berkontribusi tidak hanya untuk meningkatkan sensitivitas, tetapi juga akurasi pengukuran.
Sirkuit diferensial penyertaan sensor dibangun menggunakan trafo khusus yang ditenagai oleh jaringan arus bolak-balik, belitan sekunder yang dibagi menjadi dua bagian yang identik. Jadi, di sirkuit ini (Gbr. 4) dua sirkuit yang berdekatan terbentuk, yang masing-masing memiliki loop arus I1 dan I2 sendiri. Dan nilai arus pada alat pengukur ditentukan oleh perbedaan arus ini, dan jika resistansi sensor Rx dan resistor tambahan Rd sama, tidak akan ada arus pada alat pengukur.
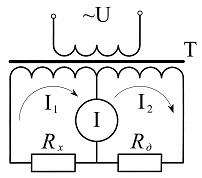
Beras. 4. Sirkuit switching sensor diferensial
Ketika resistansi sensor berubah, arus yang sebanding dengan perubahan ini akan mengalir melalui alat pengukur, dan fase arus ini akan bergantung pada sifat perubahan resistansi ini (naik atau turun). Hanya arus bolak-balik yang digunakan untuk memberi daya pada rangkaian diferensial, dan oleh karena itu lebih tepat menggunakan sensor reaktif (induktif atau kapasitif) sebagai sensor.
Sangat nyaman untuk menggunakan sirkuit switching seperti itu ketika bekerja dengan sensor induktif atau kapasitif diferensial. Saat menggunakan sensor semacam itu, tidak hanya besarnya gerakan, misalnya inti feromagnetik (Gbr. 5), tetapi juga arah gerakan ini (tandanya) dicatat, akibatnya fase bolak-balik arus yang melewati alat pengukur , berubah.Ini semakin meningkatkan sensitivitas pengukuran.
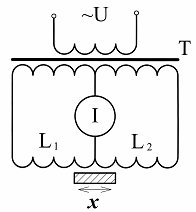
Beras. 5. Diagram koneksi sensor diferensial induktif
Perlu dicatat bahwa untuk meningkatkan keakuratan pengukuran, dalam beberapa kasus digunakan jenis sirkuit pengukur serupa lainnya, misalnya, rangkaian diferensial seimbang… Sirkuit semacam itu mencakup akor berulang atau autotransformer pengukuran khusus dengan skala khusus, dan proses pengukuran dengan sirkuit semacam itu serupa dengan pengukuran dengan sirkuit jembatan seimbang.
Skema kompensasi penyertaan sensor dianggap paling akurat dari semua yang dibahas di atas. Pengoperasiannya didasarkan pada kompensasi tegangan keluaran atau EMF. sensor yang sama dengannya dalam hal penurunan tegangan pada rheostat pengukur (rheochord). Hanya sumber DC yang digunakan untuk memberi daya pada rangkaian kompensasi dan terutama digunakan dengan sensor generator DC.
Mari kita lihat pengoperasian rangkaian ini menggunakan contoh penggunaan termokopel sebagai sensor (Gbr. 6).
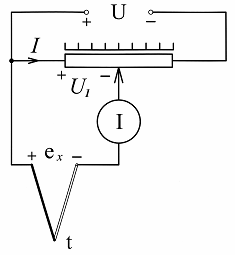
Beras. 6. Sirkuit kompensasi untuk menyalakan sensor termoelektrik
Di bawah aksi tegangan U yang diberikan, arus mengalir melalui rheostat pengukur, yang menyebabkan penurunan tegangan U1 di bagian rheostat dari output kirinya ke motor. Dalam hal persamaan voltase ini dan termokopel EMF — tidak akan ada arus yang melalui glukometer.
Jika nilai sensor ggl berubah, ketiadaan arus ini perlu dicapai lagi menggunakan penggeser penggeser. Di sini, seperti dalam rangkaian jembatan kesetimbangan, nilai parameter yang diukur, dalam kasus kami suhu (termokopel emf) ditentukan oleh skala kawat geser, dan pergerakan motornya dilakukan, paling sering, juga dengan bantuan motor listrik khusus.
Keakuratan yang tinggi dari rangkaian kompensasi disebabkan oleh fakta bahwa selama pengukuran, energi listrik yang dihasilkan oleh sensor tidak dikonsumsi, karena arus dalam rangkaian inklusi adalah nol. Sirkuit ini juga dapat digunakan dengan sensor parametrik, tetapi kemudian diperlukan sumber DC tambahan, yang digunakan dalam rangkaian catu daya sensor parametrik.