Parameter dasar dan karakteristik relai elektromagnetik
 Peralatan listrik yang menerapkan hukum kontrol relai disebut relai... Dalam relai, ketika parameter kontrol (input) diubah dengan mulus ke nilai yang ditetapkan, parameter yang dikontrol (output) berubah secara tiba-tiba. Juga, setidaknya salah satu dari parameter ini harus listrik.
Peralatan listrik yang menerapkan hukum kontrol relai disebut relai... Dalam relai, ketika parameter kontrol (input) diubah dengan mulus ke nilai yang ditetapkan, parameter yang dikontrol (output) berubah secara tiba-tiba. Juga, setidaknya salah satu dari parameter ini harus listrik.
Aksi organ fungsional relai elektromagnetik dapat dilacak sesuai dengan diagram pada gambar. 1. Badan penerima A mengubah nilai input (tegangan) Uin yang disuplai ke koil 2 dari sirkuit magnetik 1 menjadi nilai perantara, mis. dalam gaya mekanis jangkar 3. Gaya mekanis jangkar FЯ bekerja pada sistem kontak badan eksekutif B. Nilai antara — gaya jangkar FЯ, sebanding dengan nilai input Uin, dibandingkan dengan a nilai yang diberikan dari gaya Fpr yang dikembangkan oleh pegas 9 dari benda perantara B. Ketika Uin <Uav, Fya
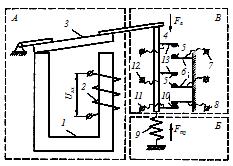 Beras. 1 Skema relai elektromagnetik
Beras. 1 Skema relai elektromagnetik
Dalam proses operasinya, relai elektromagnetik pada skala waktu membedakan empat fase: periode (waktu) penggerak tav, periode kerja twork, periode (waktu) shutdown toff, periode (waktu) istirahat tp (Gbr. .2).
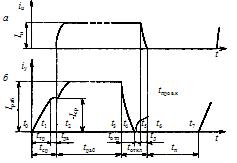
Beras. 2. Ketergantungan jumlah output (a) dan output (b) tepat waktu
Periode aktuasi relai elektromagnetik
 Periode respons mencakup interval waktu dari saat sinyal input mulai memengaruhi badan pemantau hingga sinyal muncul di sirkuit yang dikontrol. Segmen sumbu absis tav \u003d t2 –t0 sesuai dengan periode ini dalam gambar. 2, b. Pada saat t0 arus dalam koil relai meningkat ke nilai di mana gaya elektromagnetik Fe yang bekerja pada jangkar mulai melawan gaya pegas Fm (gaya mekanik) dari benda perantara. Nilai masukan tersebut kemudian disebut nilai penerimaan.
Periode respons mencakup interval waktu dari saat sinyal input mulai memengaruhi badan pemantau hingga sinyal muncul di sirkuit yang dikontrol. Segmen sumbu absis tav \u003d t2 –t0 sesuai dengan periode ini dalam gambar. 2, b. Pada saat t0 arus dalam koil relai meningkat ke nilai di mana gaya elektromagnetik Fe yang bekerja pada jangkar mulai melawan gaya pegas Fm (gaya mekanik) dari benda perantara. Nilai masukan tersebut kemudian disebut nilai penerimaan.
Periode awal sesuai dengan segmen ttr = t1 — t0. Pada waktu t1, armature dari elektromagnet relay mulai bergerak. Selama tdv = t2 — t1, jangkar bergerak, mengatasi hambatan badan perantara B (lihat Gambar 1) dan mengaktifkan badan eksekutif C.
Pada akhir langkah jangkar, kontak penggerak menutup, arus beban dalam (Gbr. 2, a) mulai meningkat dari nol ke nilai kesetimbangan. Nilai input di mana kontrol rangkaian output dimulai disebut nilai penerimaan (Iav). Daya Psr yang sesuai dengan Isr disebut daya penggerak.
Waktu respons t cf = ttr + tdv.
Waktu respons relai elektromagnetik bervariasi dari 1-2 hingga 20 ms. Relai waktu elektromagnetik memberikan penundaan hingga 10 detik.
Untuk memperkirakan waktu respons relai, diperbolehkan menggunakan ekspresi
t cf = t1kz-bm –a,
di mana t1 adalah waktu respons untuk faktor keamanan tertentu ks dan faktor m = 1; a, b — koefisien yang ditentukan tergantung pada jenis relai dan nilai kz dan m.
Untuk relai kecepatan tinggi pada kz = 1,5¸2, nilai koefisien a mendekati satu. Untuk relai biasa dengan k z = 1.5¸3, nilai a = 0.25¸0.95, nilai koefisien b biasanya berada pada kisaran 1.4-1.6.
Periode pengoperasian relai elektromagnetik
 Masa kerja meliputi selang waktu twork = t3 — t2, yaitu waktu dari saat kontrol sirkuit keluaran t2 hingga saat penghentian dampak pada organ sensitif dari sinyal input t3. Arus mulai naik ke nilai stasioner Iwork (Gbr. 2, b) — ini adalah nilai kerja dari nilai input, yang memastikan pengoperasian relai yang andal.
Masa kerja meliputi selang waktu twork = t3 — t2, yaitu waktu dari saat kontrol sirkuit keluaran t2 hingga saat penghentian dampak pada organ sensitif dari sinyal input t3. Arus mulai naik ke nilai stasioner Iwork (Gbr. 2, b) — ini adalah nilai kerja dari nilai input, yang memastikan pengoperasian relai yang andal.
Rasio Iwork / Icr = kz disebut faktor keamanan di tempat kerja.
Untuk mengkarakterisasi kapasitas kelebihan elemen sensitif relai, nilai kuantitas input digunakan, yang disebut nilai batas kuantitas operasi Ioperating.max.
Batasan nilai kerja — ini adalah nilainya yang dapat ditahan oleh organ sensitif untuk jangka waktu normal yang singkat. Namun, nilai nilai ini tidak dapat diterima ketika relai beroperasi dalam mode normal karena kondisi listrik atau kekuatan mekanik atau pemanasan.
Konsep daya kontrol Ru digunakan untuk mengkarakterisasi daya dukung beban penggerak relai. Daya kontrol adalah daya dalam sirkuit terkontrol yang dapat ditransmisikan oleh drive untuk waktu yang lama.
Periode perjalanan relai elektromagnetik
 Periode off berisi interval waktu toff = t6 — t3, yaitu waktu dari saat penghentian dampak pada organ penerima t3 hingga saat arus dalam rangkaian yang dikendalikan berkurang menjadi nol (Gbr. 16, a).
Periode off berisi interval waktu toff = t6 — t3, yaitu waktu dari saat penghentian dampak pada organ penerima t3 hingga saat arus dalam rangkaian yang dikendalikan berkurang menjadi nol (Gbr. 16, a).
Periode mati mencakup periode pelepasan totp = t4 — t3 di mana relai mati. Arus iy dalam koil relai turun menjadi nol (Gbr. 2, b). Selama periode ini, gaya pegas lawan (gaya mekanik) melebihi gaya elektromagnetik, mis. Fm> Fe dan angker dilepaskan.
Setelah memilih kegagalan kontak (interval tc = t5 — t4), kontak relai terbuka dan busur dinyalakan di antaranya, yang padam setelah waktu td = t6 — t5. Selama periode td, arus dalam rangkaian terkontrol berkurang dari In ke nol (Gbr. 2, a).
Waktu istirahat t t = tp + tc + td.
Periode trip ditandai dengan faktor pemulihan, yang merupakan rasio Iotp arus jatuh ke Iav arus pickup: kv = Iotp / Icr.
Biasanya, untuk relai proteksi sistem tenaga dan relai kontrol yang mengontrol parameter input dalam batas sempit, kv harus mendekati satu.
Masa istirahat relai elektromagnetik
Waktu istirahat adalah selang waktu tp = t7 — t6.
Periode latensi ditandai dengan parameter yang disebut nilai tidak beroperasi, yang merupakan nilai terbesar dari kuantitas input yang memastikan relai tidak beroperasi atau ditahan. Waktu shutdown lebih pendek dari waktu start-up operasi dan waktu rilis.
Perbandingan daya kontrol dengan daya penggerak disebut gain, ku = Py / Pcr.
Jumlah start per satuan waktu ditentukan oleh nilai yang berbanding terbalik dengan waktu siklus:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota O.B.