Penggerak listrik kerekan listrik dan balok derek
 Troli listrik yang ditangguhkan (kerek listrik, kerekan dan balok derek) digunakan untuk mengangkat dan memindahkan beban dan bagian-bagian mesin selama pekerjaan perakitan dan perbaikan di lokasi industri. Kerekan listrik, kerekan dan derek lebih kecil dari derek jembatan, yang mengurangi ukuran bangunan industri dan pemeliharaannya tidak memerlukan personel yang berkualifikasi.
Troli listrik yang ditangguhkan (kerek listrik, kerekan dan balok derek) digunakan untuk mengangkat dan memindahkan beban dan bagian-bagian mesin selama pekerjaan perakitan dan perbaikan di lokasi industri. Kerekan listrik, kerekan dan derek lebih kecil dari derek jembatan, yang mengurangi ukuran bangunan industri dan pemeliharaannya tidak memerlukan personel yang berkualifikasi.
Troli listrik yang ditangguhkan dirancang untuk mengangkat dan memindahkan barang di fasilitas produksi di sepanjang jalur yang ditentukan secara ketat.
Truk listrik (Gbr. 1) terdiri dari 3 bagian utama: mekanisme pengangkatan (kerekan listrik) yang dirancang untuk mengangkat (menurunkan) dan menahan beban, mekanisme pergerakan (undercarriage) yang dirancang untuk memindahkan beban yang diangkat ke arah posisi yang ditentukan secara ketat , sebuah monorel yang mendefinisikan pergerakan horizontal dalam dua arah.
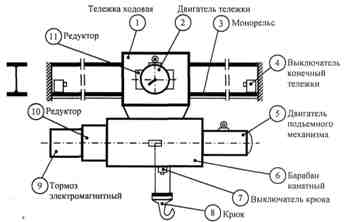
Beras. 1. Diagram kinematik dari gerbong listrik yang ditangguhkan
Kerekan listrik dipasang pada troli yang berfungsi dan mencakup peralatan berikut: motor listrik (5) dari mekanisme pengangkatan, kotak roda gigi silinder (10) untuk mengurangi kecepatan putaran motor listrik ke nilai yang memberikan kecepatan linier tertentu mengangkat (menurunkan) kait, rem elektromagnetik (9), untuk menghentikan motor poros ketika terputus dari listrik atau tegangan hilang dalam jaringan, rem pengereman diaktifkan, bekerja pada gaya pegas, saat poros dililitkan di sekitar poros, sakelar batas (7) kait, untuk membatasi pengangkatan kait, saat ditekan, mesin terputus dari jaringan dan melambat, drum tali (6), untuk belitan ( unwinding) dan menyimpan tali, pengait (8), untuk mengamankan beban yang diangkat.
Undercarriage dipasang pada monorel (3), didukung oleh roda penggerak pada flensa bawah rel ganda. Menggerakkan roda melalui gearbox silinder (11) dengan motor listrik (2).
Monorel — I -beam dengan sakelar batas (4) di ujungnya untuk membatasi gerakan horizontal.
Hoist listrik TEP-1 (kapasitas beban 1 t, tegangan 380 V) terdiri dari mekanisme pengangkatan dan pemindahan dengan penggerak listrik individual. Drum kerja 2 digerakkan oleh mesin 20 melalui gearbox planet yang terdiri dari satelit 5, 7, 8, blok roda gigi 13, roda gigi matahari 6, 9, pembawa 14, 15. Poros penggerak utama 4 saat mesin mati dihentikan oleh cakram 10 di bawah aksi pegas 11.
Untuk menggerakkan mekanisme pengangkatan pada kecepatan 6,5-6,9 m / s, digunakan motor asinkron dengan peningkatan slip tipe AOS-32-4M (daya 1,4 kW pada 1320 rpm dan siklus kerja = 25%).Gerakan kait ke atas dibatasi oleh sakelar batas.
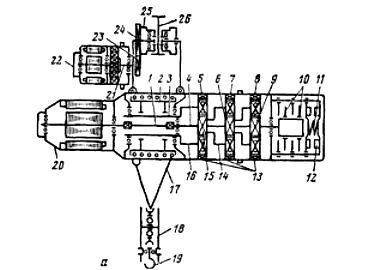
Beras. 2. Penggerak listrik kerekan listrik TEP -1: 1 — drum kerja, 3 — poros berongga, 4 — poros kerja, 5, 7, 8 — satelit, 6, 9, 15 — roda gigi matahari, 10 — cakram rem, 11 — pegas rem, 12 — elektromagnet, 13 — roda gigi blok, 14, 16, 21 — pembawa, 17 — kabel, 18 — suspensi, 19 — pengait, 20 — motor listrik untuk mengangkat beban, 22 — motor listrik troli, 23, 24 — roda gigi, 25 — rol, 26 — monorel.
Gambar 3 menunjukkan pengoperasian hoist. Efisiensi kerekan listrik meningkat menjadi 0,58 ketika massa beban yang diangkat meningkat menjadi 1000 kg.
Mode operasi motor 4 yang menarik saat menurunkan beban: sementara berat beban kurang dari 425 kg, motor listrik bekerja dalam mode motor, dan saat massa lebih dari 425 kg - dalam mode generator. Oleh karena itu, untuk mengatasi momen idle mekanisme pengangkatan, beban seberat 425 kg sudah cukup.
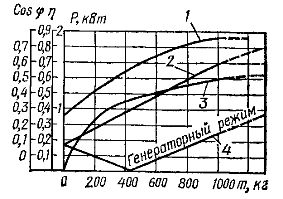
Beras. 3. Karakteristik pengoperasian kerekan listrik: 1 — ssphi motor listrik, 2 — daya motor listrik saat mengangkat beban, 3 — efisiensi, 4 — daya motor listrik saat menurunkan beban.
Untuk menggerakkan undercarriage kerekan listrik, motor listrik asinkron 22 (Gbr. 2) dari tipe TEM-0,25 (daya 0,25 kW pada 1410 rpm dan siklus kerja = 25%) dengan gearbox satu tahap planetary bawaan dan gigi 23, 24, mentransmisikan rotasi roller 25. Perangkat pengereman tidak dipasang pada mekanisme pergerakan kerekan yang paling sederhana. Pergerakan kerekan di sepanjang balok di kedua arah dibatasi oleh penghentian mekanis.
 Jib crane berbeda dari hoist karena balok tempat hoist berjalan dapat bergerak di sekitar ruang produksi, digerakkan oleh sangkar tupai atau motor listrik fase rotor. Jembatan balok derek yang memiliki mekanisme penggerak elektrik dibuat dalam bentuk balok tunggal tempat undercarriage elektrik bergerak.
Jib crane berbeda dari hoist karena balok tempat hoist berjalan dapat bergerak di sekitar ruang produksi, digerakkan oleh sangkar tupai atau motor listrik fase rotor. Jembatan balok derek yang memiliki mekanisme penggerak elektrik dibuat dalam bentuk balok tunggal tempat undercarriage elektrik bergerak.
Motor asinkron tiga fase dengan rotor sangkar tupai digunakan untuk menggerakkan mobil listrik tempel dan hanya dengan kapasitas beban tinggi dan kebutuhan untuk pengaturan kecepatan dan "pendaratan" yang mulus dari motor asinkron beban dengan rotor fase.
Karena kurangnya kecepatan rendah yang diperlukan untuk pendaratan beban yang mulus atau penghentian derek yang akurat, pekerja harus menghidupkan dan mematikan motor listrik secara berkala, dan ini meningkatkan jumlah penyalaan dan menyebabkan pemanasan belitan, dan juga mengurangi ketahanan aus dari kontak. Oleh karena itu, pada beberapa derek terdapat penggerak listrik untuk mengangkat dan berjalan dengan dua kecepatan operasi: nominal dan rendah, yang disediakan dengan menggunakan motor asinkron dua kecepatan alih-alih kecepatan tunggal atau penggerak mikro tambahan.
 Troli listrik gantung berkecepatan rendah (0,2 — 0,5 m / s) yang ditenagai oleh motor sangkar tupai biasanya dikendalikan dari permukaan lantai (tanah) menggunakan suspensi stasiun tombol tekan… Di troli udara dan derek dengan kabin untuk operator (pada kecepatan 0,8 — 1,5 m / s), motor dengan rotor fase dikendalikan oleh pengontrol.
Troli listrik gantung berkecepatan rendah (0,2 — 0,5 m / s) yang ditenagai oleh motor sangkar tupai biasanya dikendalikan dari permukaan lantai (tanah) menggunakan suspensi stasiun tombol tekan… Di troli udara dan derek dengan kabin untuk operator (pada kecepatan 0,8 — 1,5 m / s), motor dengan rotor fase dikendalikan oleh pengontrol.
Motor listrik kerekan dan derek di atas kepala dikendalikan oleh starter magnetik reversibel dan tombol mulai ditangguhkan dari kabel lapis baja yang fleksibel.Tegangan ke koil dan kontak kontaktor untuk menaikkan KM1 (Gbr. 4), menurunkan KM2, menggerakkan KMZ maju dan mundur KM4 disuplai melalui pemutus sirkuit dan kabel atau kabel kontak. Gerakan ke atas dari perangkat pengangkat dibatasi oleh sakelar batas. SQ.
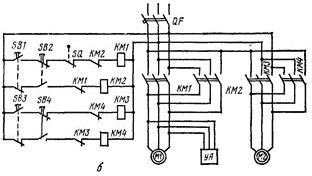
Beras. 4. Diagram skema listrik balok derek
Pemblokiran kontaktor pembalik motor dari pengaktifan simultan dilakukan dengan menggunakan tombol sirkuit ganda dan pemblokiran mekanis dari kontaktor itu sendiri (atau pembukaan kontak bantu kontaktor).
Pada kerekan listrik dan derek di atas kepala, tombol mulai tidak dilewati oleh kontak interlock kontaktor penutup yang sesuai, mencegah kerekan untuk terus beroperasi setelah operator melepaskan stasiun liontin tombol tekan. Bersamaan dengan motor pengangkat, solenoida UA digerakkan, yang membuka rem.
Waktu mulai maksimum yang diizinkan untuk mekanisme pengangkatan adalah 3 — 5 detik, untuk mekanisme gerakan — 10 — 15 detik.
Anda juga dapat melihat: Peralatan listrik dan rantai kerekan listrik
Cara pengoperasian mesin truk listrik, kerekan listrik, dan derek di atas kepala bergantung pada tujuannya. Jika barang dipindahkan dengan derek jembatan dalam jarak pendek, maka mesin bekerja dalam mode jangka pendek yang memalukan (misalnya, di troli yang melayani bagian bengkel atau gudang).

Untuk crane overhead yang mengangkut barang melintasi wilayah pabrik dalam jarak yang relatif jauh, mode pengoperasian motor pengangkat dan penggerak berbeda: yang pertama ditandai dengan mode jangka pendek, yang kedua dengan mode jangka panjang. motor untuk mengangkat dan memindahkan kerekan listrik, kerekan dan derek gantry ditentukan dengan cara yang sama seperti untuk mesin mekanisme derek di atas kepala.