Cara mengurangi riak tegangan yang diperbaiki
 Tegangan yang diterima oleh penyearah tidak konstan, tetapi berdenyut. Ini terdiri dari komponen konstan dan variabel. Semakin besar komponen variabel sehubungan dengan konstanta, semakin besar gangguan dan semakin buruk kualitas tegangan yang diperbaiki.
Tegangan yang diterima oleh penyearah tidak konstan, tetapi berdenyut. Ini terdiri dari komponen konstan dan variabel. Semakin besar komponen variabel sehubungan dengan konstanta, semakin besar gangguan dan semakin buruk kualitas tegangan yang diperbaiki.
Komponen variabel dibentuk oleh harmonik. Frekuensi harmonik ditentukan oleh persamaan
f(n) =kmf,
di mana k adalah bilangan harmonik, k = 1, 2, 3,…, m adalah jumlah pulsa dari tegangan yang diperbaiki, f adalah frekuensi dari tegangan listrik.
Kualitas koefisien riak tegangan yang diperbaiki p dievaluasi, yang bergantung pada nilai rata-rata tegangan yang diperbaiki dan amplitudo harmonik fundamental pada beban.
Urutan komponen harmonik n = km yang terdapat pada kurva tegangan yang disearahkan hanya bergantung pada jumlah pulsa dan tidak bergantung pada spesifik sirkuit penyearah... Harmoni dari angka terendah memiliki amplitudo tertinggi.
Nilai tegangan efektif dari komponen harmonik orde n tergantung pada nilai rata-rata tegangan Ud yang diperbaiki dari penyearah ideal yang tidak diatur:

Dalam rangkaian nyata, transisi arus dari satu dioda ke dioda lainnya terjadi dalam periode waktu terbatas tertentu, diukur dalam pecahan periode ketegangan bergantian dan disebut sudut peralihan... Kehadiran sudut peralihan sangat meningkatkan amplitudo harmonik. Akibatnya, Anda menumbuhkan gelombang kegembiraan yang diperbaiki.
Komponen AC dari tegangan yang diperbaiki, terdiri dari harmonik frekuensi rendah dan tinggi, menciptakan arus AC pada beban yang mengganggu perangkat elektronik lainnya.
Untuk mengurangi riak tegangan yang diperbaiki antara terminal keluaran penyearah dan beban termasuk filter penghalus, yang secara signifikan mengurangi riak tegangan yang diperbaiki dengan menekan harmonik.
Elemen utama dari filter smoothing adalah induktor (throttle) dan kapasitor, dan pada daya rendah dan transistor.
Pengoperasian filter pasif (tanpa transistor dan amplifier lainnya) didasarkan pada ketergantungan frekuensi dari nilai resistansi elemen reaktif (induktor dan kapasitor). Resistansi induktor Xl dan kapasitor X° C: Xl = 2πfL, X° C = 1 / 2πfC,
di mana f adalah frekuensi arus yang mengalir melalui elemen reaktif, L adalah induktansi choke, C adalah kapasitansi kapasitor.
Dari rumus resistansi elemen reaktif, dapat disimpulkan bahwa dengan peningkatan frekuensi arus, resistansi koil induktansi (tersedak) meningkat dan kapasitor menurun. Untuk arus searah, resistansi kapasitor tidak terbatas dan induktornya nol.
Fitur ini memungkinkan induktor untuk dengan bebas melewatkan komponen DC dari arus yang diperbaiki dan harmonisa tunda.Juga, semakin tinggi angka harmonik (semakin tinggi frekuensinya), semakin efektif melambat. Sebaliknya, kapasitor sepenuhnya memblokir komponen DC dari arus dan melewatkan harmonik.
Parameter utama yang mencirikan keefektifan filter adalah koefisien pemulusan (penyaringan).
q = p1 / p2,
di mana p1 adalah faktor riak dari keluaran penyearah dalam rangkaian tanpa filter, p2 adalah faktor riak dari keluaran filter.
Dalam praktiknya, filter pasif berbentuk L, berbentuk U, dan resonansi digunakan. Yang paling banyak digunakan adalah berbentuk L dan berbentuk U, diagramnya ditunjukkan pada Gambar 1
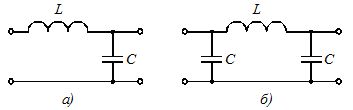
Gambar 1. Skema filter pasif berbentuk L (a) dan berbentuk U (b) untuk mengurangi riak tegangan yang diperbaiki
Data awal untuk menghitung induktansi filter choke L dan kapasitansi kapasitor filter C adalah faktor riak dari penyearah, varian sirkuit, dan faktor riak yang diperlukan dari keluaran filter.
Perhitungan parameter filter diawali dengan penentuan koefisien smoothing. Maka Anda perlu memilih rangkaian filter secara acak dan kapasitansi kapasitor di dalamnya. Kapasitansi kapasitor filter dipilih dari kisaran kapasitansi yang diberikan di bawah ini.
Dalam praktiknya, kapasitor dengan kapasitas berikut digunakan: 50, 100, 200, 500, 1000, 2000, 4000 uF. Direkomendasikan untuk menggunakan nilai kapasitansi yang lebih kecil dari rangkaian ini pada tegangan operasi tinggi dan kapasitansi besar pada tegangan rendah.
Induktansi choke dalam rangkaian filter berbentuk L dapat ditentukan dari ekspresi perkiraan

untuk skema berbentuk U —

Dalam rumus, kapasitansi diganti dalam mikrofarad, dan hasilnya diperoleh dalam Henry.

Penyaringan Tegangan Ripple yang Diperbaiki Tegangan