Prinsip pengoperasian sakelar kedekatan induktif, varietas dan contoh penggunaannya
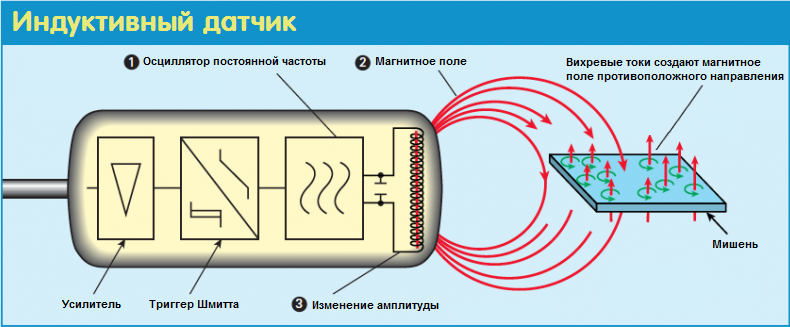
Sakelar induktif nirkontak (sensor jarak) digunakan untuk deteksi objek non-kontak otomatis dengan berbagai keperluan industri. Prinsip operasi mereka didasarkan pada fenomena perubahan amplitudo osilasi generator yang terkait dengan masuknya benda feromagnetik, magnet atau logam dengan ukuran tertentu ke dalam area kerja sensor.
Saat sensor dihidupkan, medan magnet bolak-balik bekerja di area kerjanya, dan jika sekarang logam dimasukkan ke area ini, maka target diarahkan ke logam ini. arus eddy akan menyebabkan perubahan amplitudo osilasi awal generator, sedangkan besarnya perubahan akan tergantung pada jarak antara benda logam dan sensor. Nilai yang sesuai dari sinyal analog akan diubah oleh flip-flop menjadi sinyal logika, yang akan menentukan nilai histeresis dan level switching.

Sakelar itu sendiri dalam konteks ini adalah konverter semikonduktor yang mengontrol keadaan rangkaian pemicu eksternal tertentu tergantung pada lokasi objek yang diamati, dan posisi objek ditentukan tanpa kontak mekanis dengan sensor.
Seperti yang mungkin sudah Anda ketahui, elemen sensitif di sini adalah induktor, yang sirkuit magnetiknya terbuka ke arah area kerja.
Sakelar batas induktif termasuk dalam kelompok besar sensor non-kontak untuk posisi mekanisme, yang sangat umum dalam sistem otomatis modern.
Sakelar kedekatan induktif dalam sistem otomasi tertentu bertindak sebagai alat utama untuk memantau posisi item peralatan tertentu, sinyal dari mana diproses, tergantung pada tujuan peralatan, dari penghitung produk, pengontrol gerak, sistem alarm, dll n. .
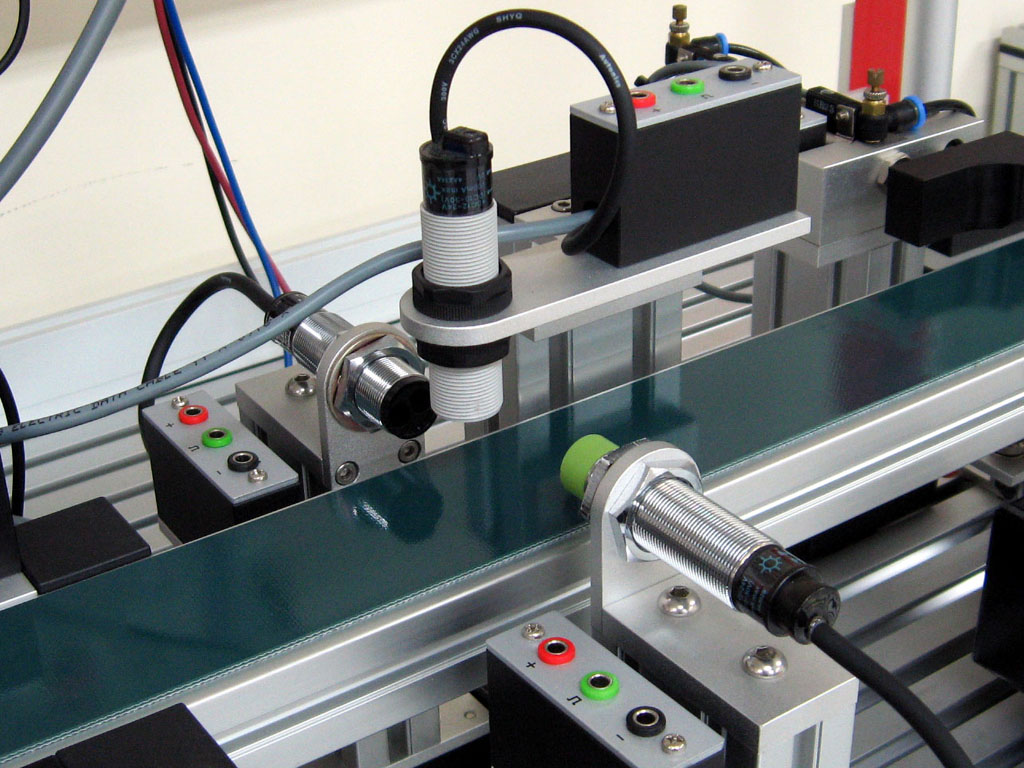
Secara khusus, sakelar kedekatan induktif sering digunakan untuk menghitung benda logam dan melacak posisinya, misalnya, botol bergerak di sepanjang konveyor, yang tutupnya dihitung, atau di bengkel perakitan, penggantian pahat terjadi setelah penghitung, flensa berada dalam kisaran sensor induktif. …
Proses pengoperasian saklar dapat digambarkan sebagai berikut. Dalam kondisi kerja, medan magnet dengan amplitudo konstan berdenyut di depan permukaan kerja sensor non-kontak.
Jika logam mendekati sensor (misalnya tutup kaleng botol atau bagian dari bagian yang terlibat dalam perakitan robot), maka akan ada kecenderungan untuk meredam osilasi medan magnet, sesuai dengan nilainya dari tegangan yang didemodulasi akan turun, pemicu dipicu, yang mengarah hingga elemen sakelar diaktifkan (misalnya hingga penghitung digerakkan atau hingga alat diubah).
Semua benda logam dengan ukuran yang cukup, misalnya: tonjolan poros, flensa, pelat baja, kepala baut kopling, dll., Dapat berfungsi sebagai objek kontrol atau penghitung untuk sakelar induktif non-kontak.

Menurut prinsip pergantian sirkuit yang dikendalikan dan metode koneksi ke sana, sensor induktif tersedia dalam beberapa varietas, dengan jumlah kabel yang berbeda. Sensor dibangun berdasarkan sakelar NPN atau PNP, mereka dapat ditutup secara normal atau terbuka secara normal.
Dua kabel - mereka terhubung langsung ke sirkuit beban dan diberi daya melaluinya, di sini sangat penting untuk mengamati polaritas dan resistansi beban nominal, jika tidak sensor tidak akan bekerja dengan benar.
Sakelar tiga kabel adalah yang paling umum, mereka memiliki daya pada dua kabel, dan yang ketiga digunakan untuk menghubungkan beban yang diaktifkan.
Terakhir, sakelar empat kabel memiliki kemampuan untuk memilih mode peralihan (biasanya tertutup atau biasanya terbuka).
Jenis sensor posisi umum lainnya dalam sistem otomatis modern: Sakelar kedekatan optik