Sensor non-kontak untuk posisi mekanisme
 Pada artikel ini kita akan berbicara tentang mekanisme sensor posisi. Pada dasarnya, fungsi utama dari setiap sensor adalah memberikan sinyal ketika suatu peristiwa tertentu terjadi. Artinya, ketika peristiwa pemicu terjadi, sensor diaktifkan dan menghasilkan sinyal, yang dapat berupa analog atau diskrit, digital.
Pada artikel ini kita akan berbicara tentang mekanisme sensor posisi. Pada dasarnya, fungsi utama dari setiap sensor adalah memberikan sinyal ketika suatu peristiwa tertentu terjadi. Artinya, ketika peristiwa pemicu terjadi, sensor diaktifkan dan menghasilkan sinyal, yang dapat berupa analog atau diskrit, digital.
Limit sensor telah digunakan sebagai sensor posisi selama beberapa dekade. sakelar. Mereka terdiri dari kontak listrik yang membuka atau menutup secara mekanis ketika beberapa variabel (posisi) mencapai nilai tertentu. Sakelar batas dari berbagai jenis merupakan bagian penting dari banyak sistem kontrol, yang keandalannya bergantung padanya. sensor semacam itu mengandung elemen mekanis bergerak yang sumber dayanya terbatas.
Sakelar batas saat ini secara aktif digantikan oleh berbagai sensor kedekatan. Paling sering sensor jarak dari jenis berikut: induktif, generator, magnetohercon dan fotoelektronik. Sensor ini tidak memiliki kontak mekanis dengan objek bergerak yang posisinya dipantau.
Sensor posisi non-kontak memastikan kecepatan tinggi dan frekuensi tinggi untuk menghidupkan mekanisme. Kerugian tertentu dari sensor ini adalah ketergantungan, keakuratannya, pada perubahan tegangan suplai dan suhu. Bergantung pada persyaratannya, perangkat keluaran dari perangkat ini dapat berupa sebagai berikut elemen logika tanpa kontakDan relai listrik.
Dalam skema pengereman presisi penggerak elektrik, sensor jarak dapat digunakan untuk memerintahkan penurunan gigi dan pemberhentian akhir.
Ada banyak jenis sensor di pasaran saat ini, tetapi dalam kerangka artikel ini kami akan menyoroti topik sensor posisi induktif secara langsung, karena dalam lebih dari 80% kasus sensor induktiflah yang berfungsi sebagai sensor untuk posisi mekanisme.
Sensor induktif dipicu ketika logam mendekati zona pemicunya. Untuk alasan ini, sensor posisi induktif juga disebut sensor kehadiran, sensor jarak, atau hanya sakelar induktif.
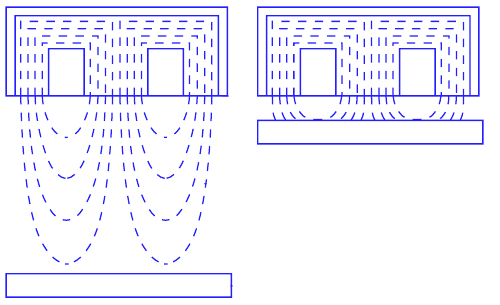
Sekarang mari kita perhatikan prinsip pengoperasian sensor induktif. Seperti disebutkan di atas, ketika logam cukup dekat dengan zona pemicu, sensor diaktifkan. Fenomena ini terdiri dari interaksi yang terlibat induktor dengan logam mendekatinya, yang secara tajam mengubah besarnya medan magnet koil, yang mengarah ke aktivasi sensor, dipicu, sinyal yang sesuai muncul pada keluarannya.
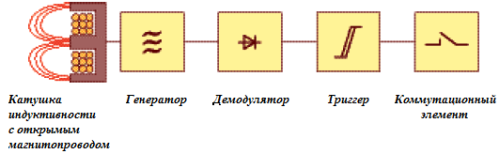
Bagian elektronik perangkat berisi rangkaian kontrol, yang pada gilirannya mengontrol sakelar relai atau transistor. Ini terdiri dari bagian-bagian berikut:
-
Generator yang menciptakan medan elektromagnetik diperlukan untuk berinteraksi dengan suatu objek.
-
Pemicu Schmitt menyediakan histeresis switching.
-
Penguat untuk meningkatkan amplitudo sinyal sehingga mencapai nilai aktuasi yang diperlukan.
-
Indikator LED menginformasikan tentang status sakelar. Ini juga menyediakan pemantauan kinerja dan konfigurasi.
-
Senyawa untuk melindungi dari penetrasi partikel padat dan air.
-
Rumah untuk memasang sensor dan perlindungan dari berbagai pengaruh mekanis Terbuat dari kuningan atau poliamida dan diakhiri dengan pengencang.
Sensor posisi induktif banyak digunakan dalam sistem otomasi industri di mana perlu untuk secara berkala atau terus-menerus menentukan posisi bagian mana pun dari mekanisme. Sensor menghasilkan sinyal yang dikirim ke drive. Starter, pengontrol, relai, konverter frekuensi, dll. Dapat bertindak sebagai mekanisme eksekutif. Hal utama adalah bahwa parameter sensor sesuai dengan parameter drive dalam hal tegangan dan arus.
Sebagian besar sensor bukanlah perangkat daya, mereka terutama perangkat pensinyalan, oleh karena itu sensor itu sendiri, sebagai suatu peraturan, tidak mengubah apa pun yang kuat, tetapi hanya mengontrol, memberikan sinyal kontrol, bertindak sebagai perangkat inisiasi tindakan yang sudah dapat dihubungkan. untuk beralih daya.
Sensor posisi induktif modern paling sering ditemukan dalam dua versi rumah plastik atau logam: persegi panjang atau silinder. Diameter sensor dengan penampang melingkar bisa dari 4 hingga 30 mm, tetapi diameter yang paling umum digunakan adalah 18 dan 12 mm.
Saat sensor dipasang pada peralatan, celah dipasang antara pelat logam dan zona penggerak sensor, biasanya jarak ini tidak melebihi diameter sensor dan, biasanya, ternyata 2-3 kali lebih kecil dari diameternya.
Menurut metode koneksi, sensor posisi induktif dapat berupa dua kabel, tiga kabel, empat kabel, dan lima kabel.
Dua kabel langsung mengalihkan beban, seperti kumparan starter, yaitu, mereka bekerja seperti saklar konvensional. Sensor dua kabel membutuhkan ketahanan beban, sehingga tidak selalu cocok sebagai alat yang andal, tetapi tidak kehilangan relevansinya.
Beban hanya dihubungkan secara seri dengan sensor, jika tegangan konstan digunakan maka penting untuk mengamati polaritasnya, jika polaritas bolak-balik tidak penting, yang utama adalah daya dan arus yang diaktifkan.
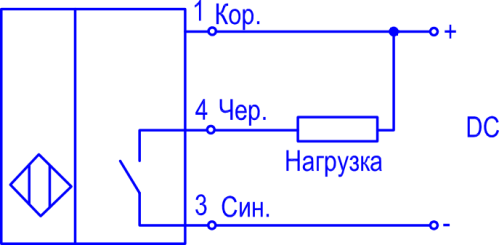
Sensor tiga kabel memiliki kabel ketiga untuk memberi daya pada sensor itu sendiri, dan ini adalah solusi paling populer. Sensor empat kabel dan lima kabel memiliki keluaran transistor atau relai untuk menghubungkan beban, dan kabel kelima memungkinkan Anda untuk memilih mode pengoperasian sensor, keadaan awal keluaran.
Karena output dapat berupa relai dan transistor, sensor dibagi menjadi tiga jenis sesuai dengan perangkat output: relai, npn, dan pnp.
Sensor dengan keluaran relai
Sensor dengan keluaran relai memiliki isolasi galvanik dari rangkaian suplai dari rangkaian yang disertakan. Ini mengganti satu kabel dan tegangan di sirkuit yang diaktifkan tidak terlalu kritis. Karena rangkaian catu daya sensor diisolasi secara galvanis, ini dapat dianggap sebagai keuntungan dari sensor relai. Sensor jenis ini biasanya berukuran besar.
Sensor dengan output transistor pnp
Sensor memiliki transistor pnp pada output yang mengubah kabel positif dengan beban. Sebuah beban terhubung ke rangkaian kolektor dari transistor pnp keluaran, yang secara permanen terhubung ke negatif melalui kabel keduanya.
Sensor dengan output transistor npn
Sensor memiliki transistor NPN pada output yang mengubah kabel negatif dengan beban. Sebuah beban terhubung ke rangkaian kolektor dari transistor npn keluaran, yang terhubung secara permanen dengan kabel keduanya ke kabel positif.
Menurut keadaan awal keluaran, sensor posisi induktif dapat berupa kontak normal tertutup atau normal terbuka. Keadaan awal berarti keadaan ini pada saat sensor belum terpicu, yaitu tidak diaktifkan.
Jika kontak keluaran biasanya tertutup, maka beban terhubung pada waktu idle, jika biasanya terbuka, maka hingga sensor terpicu, beban akan terputus dan tidak ada daya yang akan dialirkan ke penggerak (misalnya kontaktor). Kontak yang biasanya tertutup ditetapkan dalam format bahasa Inggris — N.C. (Biasanya Tertutup), Biasanya Terbuka — N.O. (Biasanya terbuka).
Jadi, sensor dengan keluaran transistor terdiri dari empat jenis: dua jenis menurut konduktivitas (pnp atau npn) dan dua jenis menurut keadaan awal keluaran. Mungkin juga ada penundaan saat menghidupkan atau mematikan.

Bergantung pada jenis penggerak yang terhubung ke sensor, serta metode catu daya, logika sensor bisa positif atau negatif. Ini karena level tegangan yang mengaktifkan input perangkat.
Jika input diaktifkan ketika kabel negatif aktuator dihubungkan ke ground, ke minus, maka logikanya disebut negatif, koneksi seperti itu adalah karakteristik sensor dengan output transistor tipe npn.
Logika positif sesuai dengan menghubungkan kabel positif drive ke catu daya positif saat diaktifkan, logika ini khas untuk sensor dengan keluaran transistor pnp. Paling sering, ada logika positif untuk pengoperasian sensor induktif untuk posisi mekanisme.
Jenis sensor posisi induktif yang paling umum digunakan
Sensor posisi induktif IKV-22
Sensor induktif IKV-22. Pengoperasian sensor ini didasarkan pada prinsip mengubah resistansi induktif kumparan dengan inti baja ketika celah udara di sirkuit magnetik berubah.
Sirkuit magnetik dengan dua kumparan dipasang pada pelat baja, ditutup dengan penutup plastik. Dua kapasitor MBGP (satu dengan kapasitas 15 μF, 200 V, yang lain dengan kapasitas 10 μF, 400 V) dipasang ke pelat dari sisi bawah. Kapasitor ditutup dengan penutup. Kabel terhubung melalui segel. Sebuah shunt magnetik dipasang pada mekanisme, yang dimensinya minimal harus: tebal 2 mm, lebar 80 mm, panjang 140 mm. Celah udara antara sirkuit magnetik dan shunt adalah 6 ± 4 mm.
Relai keluaran biasanya dihidupkan dan dimatikan pada saat shunt magnetik melewati sensor, ketika karena perubahan resistansi induktif koil, terjadi resonansi arus dan arus melalui koil relai turun. Relai ini: tipe MKU-48, 12 V AC, arus penarikan tidak lebih dari 0,45 A, arus jatuh tidak kurang dari 0,1 A.Tegangan suplai dari rangkaian sensor adalah relai 24 V AC.
Sensor posisi induktif ID-5
Di bengkel metalurgi, sensor induktif tipe ID-5 digunakan, dirancang untuk bekerja pada suhu sekitar hingga + 80 ° C dan kelembapan hingga 100%. Debu dan kerak konduktif dapat diterima. Penguat output semikonduktor tipe UID-10 digunakan dengan sensor. Daya keluaran amplifier (25 W) cukup untuk menyalakan relai REV-800 yang tersebar luas, kontaktor KP21, MK-1, dll.
Celah udara antara sensor dan objek feromagnetik yang diamati bisa mencapai 30 mm. Dimensi sensor ID-5 adalah 187x170x70 mm, tegangan suplai 220 V ± 15%, 50 Hz.
Sakelar nirkontak BSP ukuran kecil
Sakelar gerak kecil BSP-2 (dengan keluaran non-kontak, ke elemen logika) dan BRP (dengan keluaran ke relai PE-21, 24 V, 16 Ohm) digunakan pada mesin pemotong logam.
Sakelar BSP-2 terdiri dari sensor transformator diferensial dan pemicu semikonduktor. Sistem magnet kumparan sensor pertama digerakkan oleh pelat baja, dan kumparan kedua dimanipulasi saat bergerak di atas sistem magnetnya yang terhubung ke mekanisme angker datar. Kumparan dihidupkan dalam arah yang berlawanan.
Jika angker berada di atas sensor, reaktansi induktif kumparan sama dan keluaran sensor dari transformator diferensial adalah nol. Dalam hal ini, tegangan minimal 2,5 V muncul pada output pemicu, yang cukup untuk elemen logika bekerja.
Dengan tidak adanya angker di atas sensor, tegangan diterapkan ke pelatuk, yang mengembalikannya ke keadaan semula. Maka sinyal keluaran sakelar adalah nol.
Prinsip pengoperasian sakelar BRP dalam banyak hal mirip dengan BSP-2 Sensor induktif (menurut rangkaian transformator diferensial), pemicu dan penguat dipasang di dalam kotak. Kumparan sekunder dengan jumlah putaran yang berbeda dinyalakan dengan arah yang berlawanan. Saat angker tumpang tindih dengan sistem magnetik sensor, sinyal berkurang dan setelah mengubah fase, pelatuk diaktifkan dan relai keluaran eksternal (PE-21, 24 V, 16 Ohm) diaktifkan.
Jangkar yang dipasang pada mekanisme memiliki dimensi 80x15x3 mm. Jarak antara jangkar dan sensor adalah 4 mm. Keakuratan sakelar dalam mode nominal adalah ± 0,5 mm, diferensial penggerak tidak lebih dari 5 mm. Pada. fluktuasi tegangan dan suhu suplai, kesalahan sakelar BSP-2 dan BRP dapat mencapai ± (2,5-f-3,0) mm.
Sensor induktif frekuensi tinggi VKB
Sensor induktif presisi tinggi dari tipe VKB dengan angker berbentuk U atau datar juga digunakan untuk otomatisasi mesin pemotong logam. Kutub transformator bawaan membentuk sistem elektromagnetik terbuka. Celah udara kerja adalah 0,1-0,15 mm.
Tegangan keluaran dari belitan sekunder transformator diumpankan ke rangkaian pengukuran diferensial dan kemudian ke penguat transistor. Kesalahan total sensor dengan fluktuasi suhu dari 5 hingga 40 ° C dan tegangan dari 85 hingga 110% dari nilai nominal adalah ± (0,064-0,15) mm, perbedaan respons tidak melebihi 0,4 mm. Kecepatan gerakan maksimum dari mekanisme ini adalah 10 m / mm. Dimensi sensor 62x34x24 mm. Tegangan suplai 12 V.
Jenis sensor induktif presisi khusus untuk mesin pemotong logam dengan rangkaian diferensial memiliki kesalahan kurang dari ± 0,01 mm.Sensor semacam itu termasuk sakelar gerak non-kontak dari tipe VPB12, yang terdiri dari unit sensor pada unit elektronik. Unit sensor mencakup sensor kerja induktif, sensor kompensasi induktif, dan papan sirkuit tercetak. Mekanismenya terpasang: kontrol elemen ferit. Tegangan suplai 12 V DC. Jarak eksposur maksimum tidak lebih dari 0,12 mm. Relai tipe RPU-0 dapat dihubungkan ke output sensor. Arus beban maksimum perangkat keluaran adalah 0,16 A.
Sensor posisi generator
Sensor jenis ini kompak dan sangat akurat. Generator sensor seri KVD-6M dan KVD-25 (dengan slot), KVP-8 dan KVP-16 (pesawat) telah membuktikan diri dengan baik. Mereka cocok untuk digunakan dalam konsentrasi kelembaban dan debu yang tinggi. Elemen rangkaian transistor sensor (generator dan pemicu) terletak di rumah yang terbuat dari polistiren tahan goncangan. Penyegelan dilakukan dengan senyawa pengerasan dingin. Kisaran suhu pengoperasian adalah dari — 30 hingga +50 ° C.
Sensor HPC menghasilkan sinyal diskrit ketika pelat logam ("bendera") melewati slot, menyebabkan kerusakan pada pembangkitan dan pergantian pelatuk. Lebar slot adalah 6 mm untuk sensor KVD-6M dan 25 mm untuk sensor KVD-25.
Sensor KVP-8 dan KVP-16 diaktifkan ketika pelat logam melewatinya pada jarak maksimum masing-masing 8 dan 16 mm.