Penggerak troli listrik dengan derek di atas kepala
Troli dengan derek atas adalah elemen independen dari alat pengangkat dan dirancang untuk memindahkan beban dalam jangkauan derek atas dengan kecepatan gerakan yang ditentukan secara teknologi dan akurasi yang diperlukan untuk memposisikan beban. Penggerak bogie adalah salah satu komponen utama peralatan derek di atas kepala.
Troli bergerak di jalur derek di atas kepala. Jembatan itu sendiri bergerak dengan arah tegak lurus terhadap arah gerak gerobak. Mekanisme pengangkatan dipasang pada gerobak, yang dilengkapi dengan pengait (atau elektromagnet) yang dapat digunakan untuk memindahkan beban. Pergerakan bogie merupakan bagian integral dari siklus teknologi derek di atas kepala (Gbr. 1).
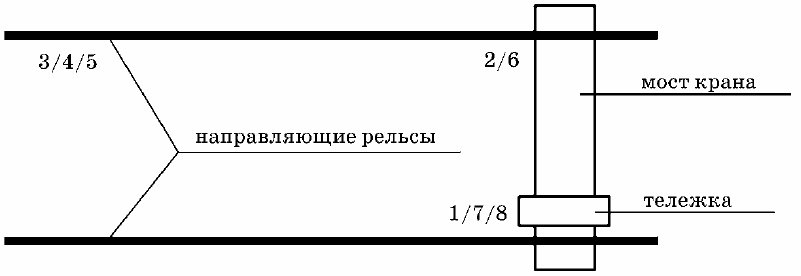
Beras. 1. Skema untuk melakukan operasi dengan derek jembatan dalam satu siklus kerja
Siklus ini terdiri dari operasi berikut (dalam Gambar 1, nomor operasi ditunjukkan dalam angka):
1 — mengangkat beban;
2 — memindahkan gerobak ke posisi tertentu;
3 — memindahkan derek ke posisi yang telah ditentukan;
4 — mengurangi berat beban;
5 — mengangkat kait dengan berat beban;
6 — memindahkan derek ke posisi semula;
7 — memindahkan gerobak ke posisi semula;
8 — menurunkan kail.
Seperti dapat dilihat dari siklus proses overhead crane, motor penggerak troli dihidupkan pada operasi kedua dan ketujuh. Saat bogie mendekati posisi tertentu dalam jarak derek di atas kepala, motor listrik penggerak bogie direm secara elektrik untuk memastikan akurasi pengereman yang diperlukan.
Mesin kemudian dimatikan dan rem mekanis diterapkan. Selain itu, penggerak listrik dari pergerakan jembatan dihidupkan dan beban bergerak di sepanjang bengkel sesuai dengan tugas teknologinya. Mencapai tempat yang ditentukan, derek berhenti, beban diturunkan, dan kemudian operasi teknologi yang diperlukan dilakukan.

Diagram kinematik mekanisme pergerakan troli dengan overhead crane ditunjukkan pada Gambar 2. Mekanisme pergerakan troli dibuat sesuai skema dengan gearbox di tengah antara roda penggerak.
Penggerak dari motor listrik D melalui cakram rem T, kotak roda gigi P, kopling M, dan poros B disalurkan ke roda yang sedang berjalan. Katrol rem digunakan untuk menjaga kereta tetap diam.
Gerobak tersebut memiliki empat roda travel dan dua roda penggerak. Roda perjalanan troli derek biasanya dibuat dengan dua tulang rusuk.
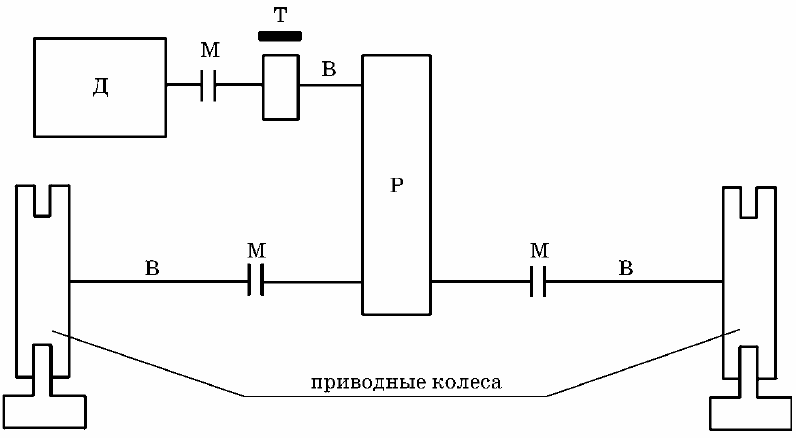
Beras. 2. Diagram kinematik dari mekanisme pergerakan troli
Waktu untuk memindahkan gerobak ke posisi yang ditentukan akan ditentukan dengan memperhitungkan waktu untuk mempercepat dan memperlambat gerobak dengan akselerasi yang diperlukan.Berdasarkan kondisi proses teknologi, tachogram saat menggerakkan gerobak harus berbentuk seperti yang ditunjukkan pada Gambar 3.
Hal ini diperlukan untuk memastikan awal yang mulus dari mekanisme bogie ke kecepatan tertentu dengan akselerasi yang diperlukan. Untuk memastikan akurasi pemosisian yang diperlukan, diperlukan perlambatan halus penggerak listrik dengan transisi ke pengurangan kecepatan, setelah itu troli berhenti.
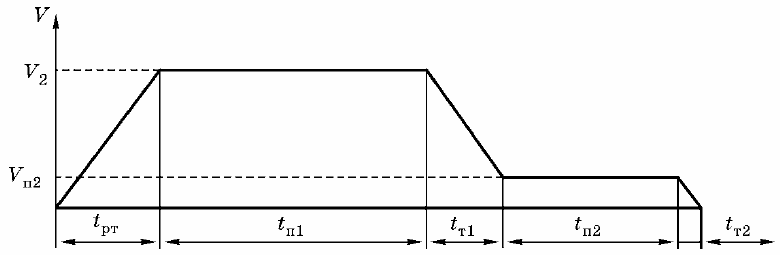
Beras. 3. Tachogram dari mekanisme pergerakan troli
Pergerakan bogie dengan benturan pada struktur logam di sambungan rel, akselerasi dan deselerasi yang intens, getaran alami dari struktur logam saat mesin dibebani menyebabkan benturan mekanis yang sangat kuat pada peralatan listrik yang terletak di bogie derek jembatan. Berdasarkan hal tersebut, penggerak listrik untuk menggerakkan troli harus memenuhi persyaratan sebagai berikut:
1) penggerak listrik harus memberikan kemampuan untuk memulai mekanisme bergerak, membalikkan arah gerakan dan menghentikan mekanisme dengan akselerasi yang diperlukan (m / s2) dan akurasi pemosisian yang benar (mm);
2) penggerak listrik harus memberikan kontrol kecepatan yang mulus dari sumber utama;
3) torsi mesin yang dikembangkan harus memastikan pengoperasian mekanisme pada intensitas tertentu;
4) pada jumlah start mesin tertentu per jam, tidak boleh ada belitan yang terlalu panas, yang memungkinkan penghentian mekanisme yang berkepanjangan;
5) motor harus dipilih sesuai dengan kondisi operasi, yaitu harus memiliki desain yang sesuai, dan belitannya harus tahan panas dan memiliki insulasi terhadap kelembapan;
6) motor penggerak harus memiliki massa roda gila terkecil yang berdampak signifikan pada aliran transien selama penyalaan penggerak yang sering;
7) motor penggerak harus sesuai dengan kekuatan mekanisme yang berjalan dan memiliki kapasitas kelebihan beban yang diperlukan;
8) penggerak listrik harus memastikan pembentukan proses transien dengan durasi minimum;
9) keselamatan dan kemudahan perawatan harus diperhitungkan dalam desain penggerak listrik.

Momen statis untuk mekanisme gerak yang beroperasi pada jalur lintasan horizontal di fasilitas produksi diciptakan oleh gaya gesek geser di bantalan dan gesekan guling dari roda bogie yang menggelinding di rel derek di atas kepala. Momen statis mekanisme selama gerakan troli ke depan ditentukan oleh kapasitas angkat derek. Momen statis mekanisme selama gerakan mundur bogie dihitung untuk beban yang tidak lengkap.
Untuk penggerak listrik troli derek di atas kepala, motor rotor sangkar-tupai asinkron (termasuk sebagai bagian dari penggerak frekuensi variabel), motor induksi rotor belitan dan motor DC yang dieksitasi secara independen.