Balikkan dan hentikan motor induksi sangkar-tupai
Motor induksi adalah mesin reversibel. Untuk mengubah arah putaran rotor, arah putaran medan magnet perlu diubah (dengan mengalihkan kabel suplai ke terminal dua fase motor) — Start mesin dan sirkuit rem
Karakteristik mekanik untuk dua arah rotasi ditunjukkan pada Gambar. 1.
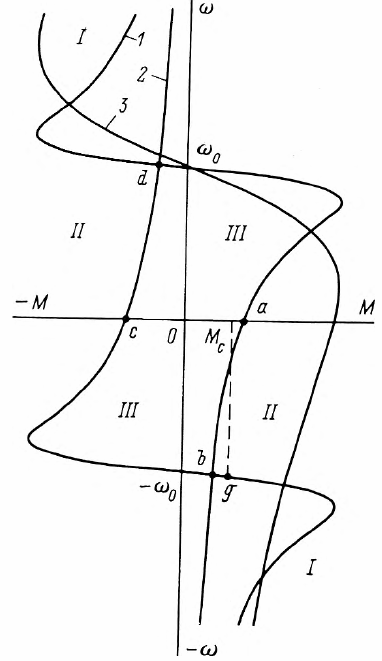
Beras. 1. Keluarga karakteristik mekanis motor induksi untuk operasi bolak-balik dalam mode berhenti dengan suplai energi ke jaringan (I), mode oposisi (II) dan motor (III) 1, 2 — alami; 3 — buatan.
Motor induksi sangkar tupai dapat digunakan tidak hanya sebagai motor tetapi juga sebagai rem. Dalam mode stop, setiap motor listrik selalu bekerja sebagai generator. Dalam hal ini, motor listrik induksi dengan rotor sangkar tupai dapat memiliki tiga mode pengereman.
Dalam mode pengereman regeneratif, alat berat beroperasi dengan selip negatif. Dalam hal ini, kecepatan rotor melebihi kecepatan putaran medan magnet.Tentu saja, untuk beralih ke mode ini, momen aktif eksternal harus diterapkan ke sisi poros.
Mode umpan balik banyak digunakan dalam instalasi pengangkatan. Selama penurunan, sistem propulsi, karena energi potensial beban, dapat memperoleh kecepatan yang melebihi kecepatan rotasi medan magnet, dan penurunan akan terjadi dalam keadaan kesetimbangan yang sesuai dengan titik g tertentu pada karakteristik mekanis , saat momen statis yang diciptakan oleh beban menurun, diimbangi oleh torsi pengereman mesin.
Pada penggerak konvensional dengan torsi statis reaktif, mode yang dimaksud hanya diimplementasikan melalui rangkaian kontrol khusus, yang memungkinkan untuk mengurangi kecepatan putaran medan magnet. Karakteristik mekanis mesin induksi untuk mode umpan balik ditunjukkan pada gambar yang sama. 1.
Seperti yang ditunjukkan, torsi maksimum dalam mode generator sedikit lebih tinggi daripada mode motor, dan slip kritis dalam nilai absolutnya sama.
Generator asinkron memiliki jangkauan yang sangat sempit, yaitu pembangkit listrik tenaga angin... Karena gaya angin tidak konstan dan, karenanya, kecepatan putaran perangkat berubah secara signifikan, generator asinkron lebih disukai dalam kondisi ini.
Yang paling banyak digunakan adalah mode pengereman — oposisi. Transisi ke mode motor asinkron ini, serta motor DC, dimungkinkan dalam dua kasus (Gbr. 1): dengan peningkatan torsi statis yang signifikan (bagian ab) atau saat mengganti belitan stator ke arah rotasi yang berbeda ( bagian cd).
Dalam kedua kasus, motor beroperasi dengan slip lebih besar dari 1 hingga arus melebihi arus start. Oleh karena itu, untuk motor sangkar tupai, mode ini hanya dapat digunakan untuk menghentikan penggerak dengan cepat.
Ketika kecepatan nol tercapai, motor harus diputuskan dari sumber listrik, jika tidak maka akan cenderung berakselerasi ke arah yang berlawanan.
Saat mengerem dengan motor rotor belitan berlawanan, resistansi rheostat harus dimasukkan ke sirkuit rotor untuk membatasi arus dan meningkatkan torsi pengereman.
Itu juga mungkin mode pengereman dinamis… Namun, ini menimbulkan beberapa kesulitan. Saat motor terputus dari listrik, medan magnet mesin juga menghilang. Dimungkinkan untuk membangkitkan mesin induksi dari sumber arus searah yang terhubung ke stator yang terputus dari jaringan arus bolak-balik. Sumber harus menyediakan arus dalam belitan stator yang mendekati nominal. Karena arus ini hanya dibatasi oleh hambatan listrik koil, tegangan sumber DC harus rendah (biasanya 10-12 V).
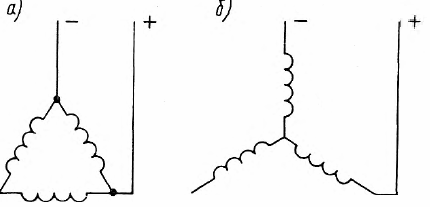
Beras. 2. Menghubungkan stator motor induksi ke sumber DC dalam mode pengereman dinamis saat terhubung dalam delta (a) dan bintang (b)
Eksitasi sendiri juga digunakan untuk pengereman dinamis. Kapasitor terhubung ke stator yang terputus dari listrik.
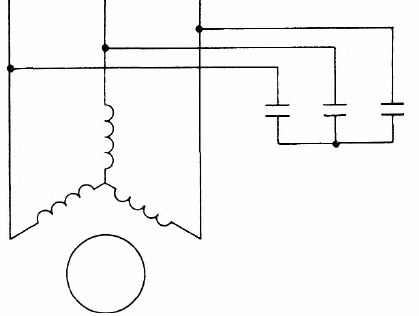
Beras. 3. Skema pengereman dinamis motor induksi self-excited
Saat rotor berputar, EMF dibuat di sirkuit stator karena magnetisasi sisa dan aliran arus melalui belitan stator serta melalui kapasitor.Ketika kecepatan tertentu tercapai di sirkuit stator, kondisi resonansi terjadi: jumlah resistansi induktif akan sama dengan resistansi kapasitif. Proses eksitasi diri mesin yang intensif akan dimulai, yang akan menyebabkan peningkatan EMF. Mode self-excitation akan berakhir ketika EMF mesin E dan penurunan tegangan pada kapasitor sama.
Torsi pengereman maksimum dengan peningkatan kapasitas bergeser ke kecepatan yang lebih rendah. Kerugian dari mode pengereman yang dipertimbangkan adalah munculnya aksi pengereman hanya dalam zona kecepatan tertentu dan kebutuhan untuk menggunakan kapasitor besar untuk pengereman pada kecepatan rendah.
Di sisi positifnya, tidak diperlukan sumber daya listrik tambahan. Mode ini selalu diimplementasikan dalam instalasi di mana bank kapasitor dihubungkan ke motor untuk meningkatkan faktor daya jaringan suplai.
Lihat juga di topik ini: Sirkuit rem untuk motor asinkron