Bagaimana bus listrik bekerja dan bekerja
Penduduk di banyak kota sudah terbiasa mengendarai bus listrik sehingga mereka hampir tidak memikirkan fakta bahwa saat ini mereka menggunakan bentuk transportasi yang ramah lingkungan dan cukup ekonomis, seperti mobil listrik multi-seater. Sementara itu, perangkat troli tidak kalah menariknya dengan perangkat, katakanlah, trem. Mari selami lebih dalam topik ini.
Bus listrik modern memiliki bagian kelistrikan yang agak rumit. Sistem kontrolnya didasarkan pada semikonduktor yang dikendalikan oleh mikroprosesor, bekerja sama dengan suspensi udara, sistem ABS, dan berinteraksi erat dengan semua bagian sistem informasi elektronik yang kompleks. Ini termasuk kemungkinan gerakan otonom, sistem pengaturan iklim mikro, dll.
Dengan demikian, bus listrik saat ini adalah kendaraan umum perkotaan lengkap yang memenuhi semua persyaratan keselamatan, kenyamanan, dan efisiensi.

Evolusi bus listrik berkembang secara bertahap, hampir sama dengan bus.Sangat mudah untuk berasumsi bahwa struktur bodi bus listrik pertama dan sasisnya pada awalnya didasarkan pada bus lantai rendah seperti Bogdan-E231, MAZ-203T, dan lainnya. Namun, bus listrik itu sendiri muncul lama kemudian. Dan city car modern seperti Electron-T191 dan AKSM-321, misalnya, segera dikembangkan sebagai troli. Namun kontinuitas bodi dari model ke model masih bisa dilacak.
Nenek moyang bus listrik di akhir abad ke-19:
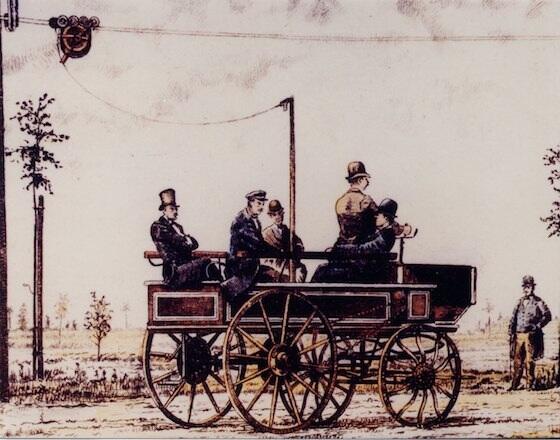
Bahkan sejak zaman Uni Soviet, kendaraan dari catenary hingga gerobak ini menjadi kebiasaan tegangan konstan 550 volt disediakan… Itu standarnya. Dalam kondisi ini, bus troli bermuatan penuh dapat mencapai kecepatan sekitar 60 km/jam di jalan datar.
Penggerak traksi pada awalnya ditujukan untuk lalu lintas perkotaan, oleh karena itu kecepatan maksimumnya dibatasi hingga 65 km / jam, tetapi bahkan pada kecepatan ini, kendaraan dapat dengan mudah bermanuver dalam jarak 4,5 meter di satu sisi atau sisi lain dari jalur kontak. Sekarang mari kita perhatikan komponen kelistrikan kendaraan yang luar biasa ini.
Unit utama bus listrik adalah mesin traksi… Dalam versi klasiknya motor DC: rangka silinder, angker dengan balok pengumpul sikat, tiang, pelindung ujung, dan kipas.
Sebagian besar motor troli DC adalah seri atau gabungan. Motor dengan kontrol transistor atau thyristor hanya bekerja dengan sistem eksitasi seri.
Dengan satu atau lain cara, motor traksi troli adalah mesin DC yang cukup mengesankan, dirancang untuk daya sekitar 150 kW dan membutuhkan konverter DC tambahan untuk operasi normal yang stabil.Motor itu sendiri dapat memiliki berat sekitar satu ton dan mengkonsumsi arus sekitar 300 A dengan torsi poros operasi lebih dari 800 N * m (pada kecepatan poros 1650 rpm).
Beberapa model troli modern membawa Motor traksi asinkron AC digerakkan oleh konverter traksi AC khusus… Mesin jenis ini tidak terlalu besar, terlebih lagi, lebih bertenaga, tidak memerlukan perawatan rutin (dibandingkan dengan mesin pengumpul).
Tetapi mesin seperti itu membutuhkan yang khusus konverter semikonduktor… Motor itu sendiri mungkin memiliki sepasang sensor kecepatan yang dipasang di poros. Sebagian besar motor traksi AC asinkron ditenagai oleh 400 V, memiliki rotor sangkar-tupai dan belitan stator tiga fase dengan koneksi "bintang" klasik.

Mesin biasanya terletak di bagian belakang bodi bus listrik. Pada poros penggeraknya terdapat flensa, yang dengannya transmisi mekanis dilakukan melalui poros penggerak ke poros penggerak melalui roda gigi penggerak.
Rumah motor sepenuhnya diisolasi dari bodi, sehingga tegangan tinggi tidak dapat mencapai bagian konduktifnya. Hal ini dipastikan dengan fakta bahwa flensa terbuat dari bahan insulasi, dan pemasangan motor pada braket tidak pernah lengkap tanpa selongsong insulasi.
Motor traksi troli modern digerakkan oleh sistem kontrol transistor-pulsa transistor IGBT, yang dianggap lebih sempurna daripada sirkuit thyristor dan bahkan lebih rheostat.
Sistem ini berisi bagian switching untuk menghubungkan komputer diagnostik dengan tujuan menyesuaikan dan mengatur sirkuit kontrol mesin, serta untuk memantau kondisi peralatan traksi secara keseluruhan. Sistem kontrol seperti itu adalah yang paling ekonomis dalam hal konsumsi energi, dan juga menyediakan penyalaan tanpa kontak dan percepatan kendaraan tanpa kehilangan energi yang tidak perlu, seperti halnya dengan sistem rheostat.
Hasilnya, bus listrik dikendalikan oleh kontrol yang kompeten dari motor traksi start mulus, pengaturan kecepatan bebas tekan, dan pengereman yang andal. Tegangan pulsa yang dapat disesuaikan dengan arus angker sekitar 50 A memungkinkan bus listrik bergerak dengan mulus, terlepas dari adanya serangan balik dalam transmisi mekanisnya.
Kontrol kecepatan diperoleh secara bertahap juga karena kemungkinan melemahnya arus kumparan medan saat kecepatan kendaraan mencapai 25 km / jam Saat pengereman, arus yang dapat disesuaikan juga digunakan - ini disebut pengereman dinamis.
Troli belakang memiliki batas kecepatan tidak lebih dari 25 km/jam Berkat elektronik, berhenti lebih diprioritaskan daripada memulai. Jika perlu, dimungkinkan untuk mengubah polaritas kerja pantograf.

Secara langsung sistem troli transistor-pulsa berfungsi sebagai berikut. Menekan pedal kaki mengaktifkan sensor aula, level sinyal analog yang berhubungan langsung dengan sudut posisi pedal saat ini.
Sinyal ini diubah menjadi digital dan, sudah dalam bentuk digital, diumpankan ke pengontrol mikroprosesor unit traksi, dari mana perintah dikirim ke dasbor pengemudi transistor daya.
Driver transistor daya, pada gilirannya, mengatur arus transistor daya tergantung pada perintah yang datang dari pengontrol mikroprosesor unit traksi. Tegangan kontrol driver adalah tegangan rendah (bervariasi dari 4 hingga 8 volt) dan nilainya yang menentukan arus operasi belitan motor traksi.
Anda dapat menebaknya, transistor daya berfungsi di sini kontaktor semikonduktortegangan dikontrol, hanya tidak seperti kontaktor konvensional, di sini arus dapat berubah dengan sangat-sangat lancar. Karenanya tidak perlu rheostat, cukup sederhana teknologi PWM (modulasi lebar pulsa).
Jika troli perlu dihentikan, maka mesin dialihkan ke mode generator, dan pengereman pada dasarnya disediakan oleh medan magnet angker, yang juga disesuaikan.Dengan demikian, pengereman dicapai hampir sampai kendaraan benar-benar berhenti. Omong-omong, bagian utama dari kontrol elektronik transistor-pulsa bus listrik terletak di atapnya.
Dalam proses menghentikan bus listrik modern, sistem bekerja pemulihan tenaga… Artinya energi yang dihasilkan oleh motor traksi dalam mode generator selama pengereman dikembalikan ke jaringan kontak dan dapat digunakan kembali baik untuk kebutuhan kendaraan listrik yang ditenagai secara paralel dari jaringan ini maupun untuk menyalakan perangkat di bus listrik itu sendiri (hidrolik setir, sistem pemanas, dll.) Jika bus listrik lewat di bawah panah, maka pengereman rheostatik.
Hampir seluruh penggerak bus listrik terdiri dari beberapa bagian:
-
pasang pantograf;
-
pemutus arus;
-
unit kontrol IGBT;
-
skema pengaturan;
-
pengontrol gerak dan rem;
-
blok rheostat;
-
tersedak untuk menekan gangguan;
-
komputer panel atau modul switching untuk terhubung ke komputer eksternal.
Dengan bantuan panel atau komputer eksternal, diagnostik motor traksi bus listrik dilakukan, parameter operasinya ditinjau, pengaturan diubah jika perlu pengontrol mikroprosesor… Semua parameter pengoperasian dan status drive traksi saat ini disimpan secara digital.
Berikut adalah beberapa model sistem kontrol belakang arus bocor dan memiliki sistem perlindungan yang sesuai — pemutusan otomatis dari jaringan. Opsional, itu juga bisa hadir di sini penghitung energi yang dikonsumsi untuk bergerak dan pulih selama berhenti.
Perlu disebutkan secara terpisah elektronik perlindungan troli, yang berfungsi untuk meningkatkan keselamatan penumpang. Misalnya, bus listrik tidak akan bergerak saat pintu penumpang terbuka atau tidak ada udara di sistem rem.