Perbandingan sakelar perjalanan kontak dan non-kontak
Dalam otomasi industri, sirkuit banyak digunakan sakelar perjalanan (posisi) dan sakelar beberapa desain yang dirancang untuk mengontrol posisi berbagai mekanisme produksi dan berdasarkan transformasi pergerakan mekanisme tersebut dalam sinyal listrik.
Sakelar posisi juga dapat digunakan untuk melakukan fungsi selain kontrol posisi mekanisme produksi, misalnya kontrol sudut rotasi, level, tekanan berat, dll.

Sakelar arah adalah perangkat dengan tindakan diskrit, bekerja berdasarkan prinsip peningkatan, yaitu, hanya bereaksi terhadap perubahan posisi mekanisme yang dikendalikan. Sinyal keluaran dari way switch adalah fungsi ambigu dari pergerakan mekanisme dari posisi awal tertentu.
Jenis sakelar jalan
Bergantung pada prinsip peralihan posisi, metode peralihan dibagi menjadi:
-
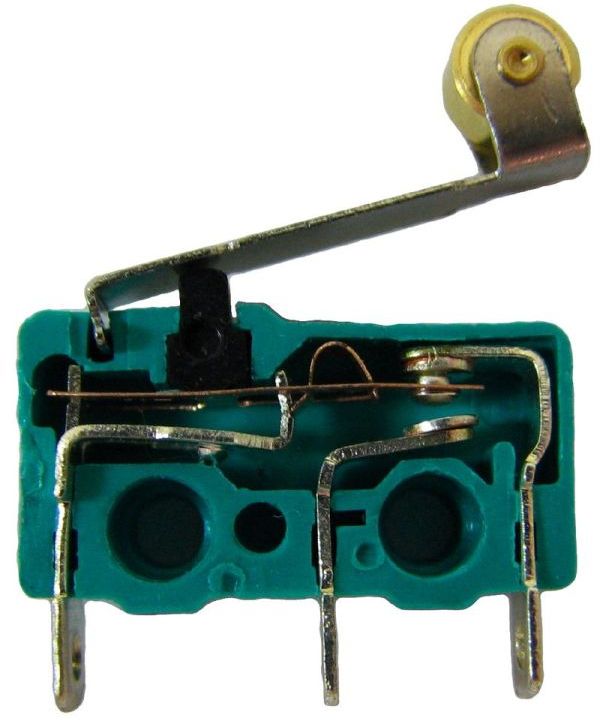
kontak mekanis yang dilakukan dengan kontak pengalih dan elemen peka kontak;
-
kontak statis (magnetomekanis), elemen sensitifnya adalah non-kontak, dan elemen switching adalah kontak;
-
elemen nirkontak statis, sensitif, dan switching dari mana nirkontak dibuat.
Dalam sifat kontak dari node "switching - stop", yaitu, dalam sifat kontak dari koneksi elemen penggerak (sinyal kontrol input) dengan elemen sensitif, node ini disebut mekanis, dan dalam non-kontak - statis .
Bergantung pada desainnya, sakelar dapat digabungkan atau dipisahkan. Dalam kasus pertama, elemen sensitif dan switching ditempatkan dalam satu wadah dan dieksekusi secara struktural secara keseluruhan. Yang kedua, elemen sensitif dapat ditempatkan pada jarak beberapa puluh dan ratusan meter dari sakelar.
Distorsi medan magnet sakelar jalur dicapai dengan mengubah parameter sirkuit magnetik elemen sensitif. Parameter variabel dapat berupa luas permukaan aktif dan juga ukuran celah udara permeabilitas magnetik sirkuit magnetik.
Saat ini, bidang penerapan sakelar posisi kontak mekanis dalam otomasi industri semakin menyempit, dan muncul pertanyaan tentang ketidakgunaan sakelar posisi jenis ini untuk tujuan membangun sistem kontrol otomatis.
Yang terakhir disebabkan oleh hal-hal berikut:
-
Kompleksitas desain rakitan sakelar-stop, karena ketatnya persyaratan mengenai batas fluktuasi yang diizinkan dari sejumlah parameter, yang menyebabkan kesulitan yang signifikan dalam pembuatan dan penyesuaiannya.
-
Kekritisan yang relatif tinggi dari karakteristik keakuratan perangkat ini terhadap pengaruh faktor destabilisasi (keausan permukaan kontak, kelonggaran pengencang, ketidaksejajaran elemen bergerak, dll.).
Sejumlah solusi desain mekanisme tidak dapat diimplementasikan sama sekali berdasarkan sakelar kontak mekanis. Ini termasuk mekanisme yang membutuhkan tingkat kecepatan dan frekuensi sakelar gerak yang diizinkan.
Jika kecepatan operasi sakelar jalan yang diperlukan dapat dikurangi karena tautan kinematik tambahan dari mekanisme, yang, antara lain, memperburuk karakteristik kualitas sistem kontrol (khususnya, parameter akurasi), maka frekuensi operasi yang diizinkan ( resolusi) tidak dapat ditingkatkan dengan komplikasi struktural.
Lihat juga: Pemasangan sakelar dan sakelar batas
Dalam hal ini, apa alasan meluasnya penggunaan prinsip kontak mekanis dari perpindahan posisi? Jawaban atas pertanyaan ini harus dicari dalam dua aspek: dalam prinsip konstruksi sistem kontrol otomatis yang ada dan dalam keunggulan sirkuit sakelar jalur kontak.
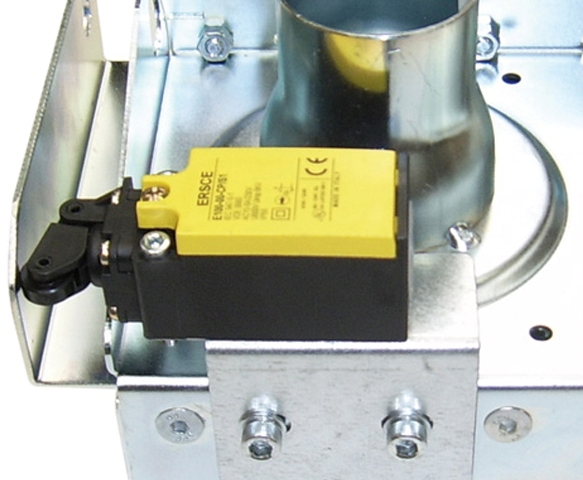
Keuntungan sakelar jalur kontak
Sakelar kontak mekanis, biasanya diimplementasikan dengan keluaran multi-sirkuit, dicirikan oleh keunggulan berikut:
-
rasio switching yang tinggi;
-
daya kontrol khusus yang tinggi (rasio daya yang disertakan dengan dimensi keseluruhan);
-
universalitas, yaitu kemampuan untuk mengganti sirkuit arus searah dan bolak-balik;
-
berbagai macam voltase yang disertakan;
-
konsumsi energi internal yang dapat diabaikan (nilai resistansi transien kontak yang kecil dalam keadaan tertutup);
-
ketergantungan rendah akurasi dan stabilitas operasi pada perubahan daya yang dikendalikan.
Kerugian dari sakelar jalur kontak
Prinsip kontak mekanis dari perangkat ini seringkali tidak memungkinkan untuk memenuhi persyaratan yang meningkat untuk keandalan, daya tahan, dan keakuratan sistem otomasi. Selain itu, sakelar kontak mekanis sangat sensitif terhadap pengaruh berbagai faktor iklim (terutama pada suhu rendah).
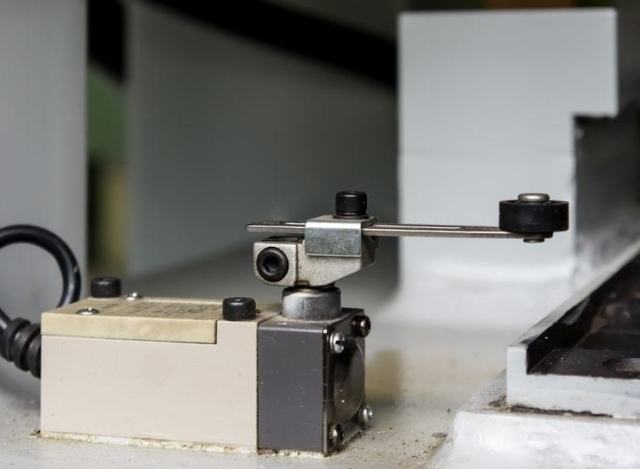
Sakelar kontak mekanis dicirikan oleh tingkat terbatas yang diizinkan dari kecepatan gerakan maksimum dan minimum dari penghentian sakelar, yang berada dalam kisaran 0,3 — 30 m / mnt, dan peningkatan kecepatan penghentian sakelar di atas level yang diizinkan menyebabkan penurunan tajam dalam daya tahan mekanis pada sakelar.
Dalam sakelar seperti itu, penyimpangan yang diizinkan dari arah aksi gaya sakelar relatif terhadap sumbu tuas sangat kecil, dan melebihinya menyebabkan kerusakan mekanis, terutama pada sakelar dengan batang tarik depan.
Untuk mendapatkan karakteristik keluaran relai (karakteristik kontrol), perangkat pemicu-pegas disediakan dalam desain sakelar tersebut. Tingkat karakteristik keluaran relai yang diperlukan dicapai dengan biaya pengurangan daya tahan sakelar yang signifikan karena tekanan dinamis besar yang terjadi pada pemicu pada saat aktuasi.
Dalam sakelar kontak sesaat mekanis, lebar loop histeresis (perbedaan langkah) dari karakteristik keluaran mencapai nilai yang signifikan, yang sama sekali tidak dapat diterima untuk sejumlah proses teknologi karena peningkatan durasi siklus pemrosesan yang tidak produktif.
Mengurangi perbedaan perjalanan pemindah gigi ini terkait dengan peningkatan kompleksitas desainnya atau peningkatan ukurannya. Selain itu, dalam beberapa kasus diperlukan gaya mekanis yang signifikan untuk menggerakkan sakelar kontak mekanis.
Keuntungan dan kerugian dari proximity switch
Keadaan yang tercantum di atas mengarah pada kebutuhan untuk mengembangkan perangkat yang tidak memiliki kekurangan yang disebutkan dan pada saat yang sama mampu menjalankan fungsi serupa. Perangkat seperti itu sakelar kedekatan, yang manfaatnya antara lain :
-
daya tahan yang signifikan dengan keandalan tinggi dan frekuensi pengoperasian tinggi yang diizinkan;
-
tidak perlu tenaga mekanis saat menggerakkan, sensitivitas rendah terhadap getaran, akselerasi, dll.;
-
sensitivitas parameter yang tidak signifikan terhadap perubahan dalam rentang kondisi eksternal yang relatif luas;
-
meningkatkan kondisi pelayanan operasional.
Karena rendahnya tingkat umpan balik dari proximity switch, penyederhanaan yang signifikan dari konstruksi stop switch dicapai sambil mempertahankan stabilitas yang tinggi dari waktu ke waktu dari karakteristik akurasi. Selain itu, tidak adanya kontak listrik dan mekanis memastikan keamanan api dan ledakan dari perangkat ini, yang secara signifikan memperluas area kemungkinan penerapannya.
Salah satu kerugian signifikan dari sakelar batas nirkontak adalah kerumitan penerapan banyak modifikasi desain yang mudah diterapkan pada sakelar batas kontak mekanis.
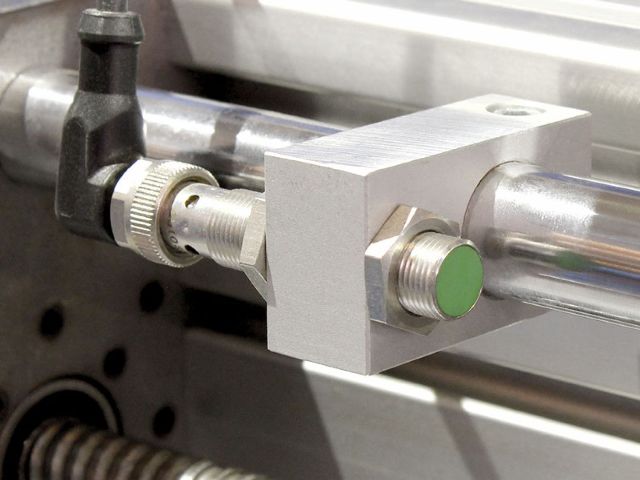
Perangkat sakelar kedekatan
Prinsip pengoperasian sakelar jalur non-kontak statis dari tipe parametrik didasarkan pada penggunaan distorsi medan magnet atau listrik yang dibuat oleh elemen sensitif ketika elemen penggerak muncul di areanya, akibatnya keadaan tidak seimbang terjadi di sirkuit listrik sakelar dan perangkat keluaran dipicu.
Sakelar kedekatan statis paling sering dibuat dengan rangkaian keluaran tunggal, dan di beberapa sakelar aktuasi disertai dengan munculnya sinyal pada keluaran (efek peralihan langsung), di lain - dengan menghilang (efek peralihan balik), yang setara untuk menutup dan membuka kontak jalur kontak mekanis masing-masing.
Jika ada elemen penguat dalam rangkaian sakelar kedekatan mode relai, parameter keluaran elemen penginderaan dapat berada dalam ketergantungan fungsional kontinu dari gerakan yang dikendalikan.
Saat ini, banyak modifikasi desain sakelar perjalanan non-kontak digunakan, berbeda dalam tingkat sensitivitas (ukuran celah kerja), lokasi slot atau bidang elemen sensitif relatif terhadap bidang pemasangan, arah kabel utama, jumlah langkah elemen penginderaan (untuk desain dengan slot), kedalaman slot, panjang kabel penghubung, tingkat tegangan suplai, sifat perlindungan terhadap pengaruh lingkungan, dll.
Kemungkinan menggunakan sakelar gerak tanpa kontak ditentukan oleh parameter karakteristik listrik dan mekaniknya.
Parameter kelistrikan meliputi:
- sifat sinyal keluaran dan jumlah sirkuit keluaran;
- konsumsi dan daya keluaran;
- bentuk sinyal keluaran; koefisien switching untuk resistansi dan voltase (untuk sakelar tipe transformator);
- karakteristik pengaturan waktu (waktu pemicu dan pelepasan) dan frekuensi penembakan (resolusi);
- level dan bentuk tegangan suplai, serta batas penyimpangan yang diizinkan.
Parameter kinerja mekanik meliputi:
- sensitivitas (ukuran celah kerja),
- dimensi dan dimensi sambungan;
- karakteristik akurasi (kesalahan besar dan tambahan) dan perbedaan stroke;
- karakteristik pemasangan (jenis rem sakelar dan cara pemasangannya, tingkat umpan balik, cara memasang dan memasang sakelar);
- tingkat perlindungan kebisingan.
Untuk informasi lebih lanjut tentang Perangkat dan Sakelar Proximity Switch, lihat di sini: Sensor non-kontak untuk posisi mekanisme
Ivenski Yu.N.Sakelar perjalanan tanpa kontak dalam otomasi industri