Simpul sirkuit kontrol otomatis sebagai fungsi waktu
 Elektromagnetik, elektronik, motor, dan elektropneumatik banyak digunakan dalam sirkuit otomasi. estafet waktu... Skema konversi durasi sinyal yang paling umum ditunjukkan pada gambar. 1. Diagram gbr. 1, dan memberikan pulsa dengan durasi tertentu, terlepas dari durasi penekanan tombol SB. Setelah menekan tombol SB, relai K diaktifkan, yang memberikan dorongan untuk menghidupkan mekanisme. Durasi pulsa ditentukan oleh waktu tunda relai KT. Tombol SB dapat diganti dengan relai perintah KQ.
Elektromagnetik, elektronik, motor, dan elektropneumatik banyak digunakan dalam sirkuit otomasi. estafet waktu... Skema konversi durasi sinyal yang paling umum ditunjukkan pada gambar. 1. Diagram gbr. 1, dan memberikan pulsa dengan durasi tertentu, terlepas dari durasi penekanan tombol SB. Setelah menekan tombol SB, relai K diaktifkan, yang memberikan dorongan untuk menghidupkan mekanisme. Durasi pulsa ditentukan oleh waktu tunda relai KT. Tombol SB dapat diganti dengan relai perintah KQ.
Diagram Gambar. 8, b (dengan relai waktu elektromagnetik) dan gbr. 1, c (dengan relai waktu elektropneumatik atau bermotor) digunakan untuk memasok pulsa jangka pendek setelah dimulainya aksi sakelar perjalanan SQ. Dalam skema ini dan selanjutnya, alih-alih kontak sakelar gerak Kontak relai KQ dapat digunakan.
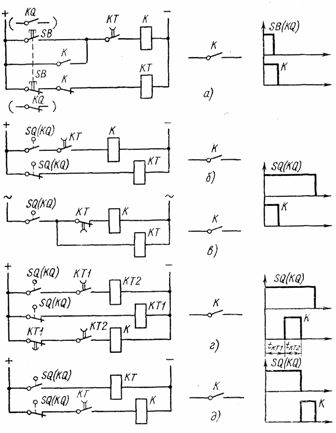
Beras. 1. Sirkuit untuk mengubah durasi sinyal
Gambar skema.1d memberikan pulsa durasi tKT2 dengan penundaan waktu tKT1 setelah dimulainya aksi sakelar SQ.
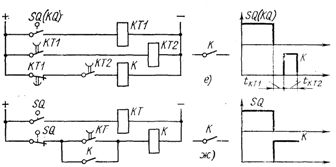
Simpul sirkuit Gambar. 1, e Jika waktu tunda tKT1 diperlukan sebelum pulsa ini diterapkan, rangkaian pada gbr. 1, e Durasi pulsa adalah tKT2.
Di sirkuit kontrol posisi, sirkuit Gambar. 1g, yang melakukan fungsi mengeluarkan perintah panjang setelah akhir dampak pada saklar perjalanan SQ. Perintah dibatalkan pada awal tindakan baru pada sakelar SQ.
Penundaan waktu yang singkat (hingga 1,5 detik) dapat diperoleh dengan menghidupkan dan mematikan dengan cara konvensional relay perantara karena shunting kumparan mereka dengan kapasitor atau dioda.
Dalam diagram ara. 2, dan ketika kontak KQ ditutup, relai K diaktifkan dengan penundaan waktu yang ditentukan oleh waktu pengisian kapasitor C. Ketika KQ ditutup, relai K juga kembali dengan penundaan karena pengosongan kapasitor.

Beras. 2. Memperoleh waktu tunda dengan shunting gulungan relai perantara dengan kapasitor atau dioda
Untuk mendapatkan waktu tunda hanya saat relai aktif, gunakan rangkaian pada Gambar. 2, b. Penundaan saat relai dimatikan praktis tidak ada, karena kapasitor dengan cepat melepaskan ke resistor R (resistansi resistor R jauh lebih kecil daripada resistansi koil relai K). Masalah serupa diselesaikan oleh sirkuit pada gambar. 2c, yang menggunakan satu kontak pembuka relai KQ. Kerugian dari rangkaian ini adalah hilangnya energi yang signifikan melalui resistor tanpa adanya sinyal.
Skema pada gambar. 2d, dimana ketika kontak KQ terbuka, relai K mati dengan penundaan waktu yang dikendalikan oleh resistor R.
Menurut diagram pada gambar. 2, e penundaan waktu dibuat saat K mati setelah kontak relai perintah KQ ditutup.
Jika sedikit keterlambatan dalam pengembalian relai K diperlukan saat relai perintah KQ diaktifkan, diagram pada gbr. 2, e, di mana koil relai K dihalangi oleh dioda.
Skema untuk menghasilkan pulsa dengan durasi dan siklus kerja tertentu ditunjukkan pada gambar. 3, sebuah. Durasi pulsa ditentukan oleh waktu tunda relai KT2, jeda ditentukan oleh waktu tunda relai KT1.
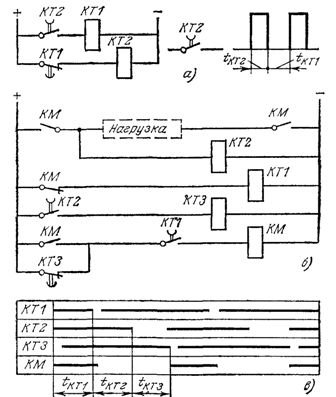
Beras. 3. Sirkuit relai untuk menghasilkan pulsa
Dalam gambar. 3, b, diagram pengaktifan berkala mekanisme dengan perpanjangan waktu jeda diberikan Waktu pengaktifan kontaktor KM sama dengan waktu tunda relai KT1, durasi jeda adalah jumlah keterlambatan relay KT2 dan KTZ. Diagram waktu ditunjukkan pada Gambar. 3, c.
Skema generator pulsa relai waktu atau unsur logis (lihat di bawah) juga digunakan untuk mengatur kecepatan operasi mekanisme linier. Pengontrol suhu juga tersebar luas, berisi perangkat perintah KEP-12U, dalam banyak hal mirip dengan relai waktu mesin. Unit ini memiliki motor eksekutif, roda gigi variabel, drum cam, sakelar, dan 12 kontak.
Pengatur kecepatan biasanya menggunakan skema untuk operasi siklik perangkat KEP-12U (Gbr. 4, a). Sirkuit dibuat menggunakan relai K1 dan K2 dan kontak dari perangkat perintah KT.1 dan KT.2, diagram sirkuitnya ditunjukkan pada gambar. 4, b.
Sebelum mulai bekerja, hidupkan sakelar S.Ketika kontak relai KQ ditutup sebentar, memberikan perintah untuk memulai siklus tugas, relai K1 diberi energi dan mengunci sendiri. Relai K2 diaktifkan dengan menyalakan perangkat perintah KT. Gulungan motor LM1 dan LM2 diberi energi dan drum cam mulai berputar. Kontak keluaran perangkat KT.3, KT.4, dll., Menutup secara berurutan, pada saat-saat waktu yang ditentukan (lihat diagram pada Gambar 4, b) memberikan perintah untuk menghidupkan mekanisme linier. Di tengah siklus, kontak KT.1 terbuka dan relai K1 mati.
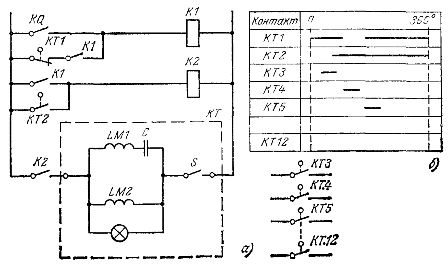
Gambar 4. Pengontrol kecepatan jalur dengan perangkat KEP-12U
Kumparan relai K2 mendukung catu daya melalui kontak perangkat KT.2. Setelah memutar drum melalui sudut 360 °, kontak KT.2 terbuka, motor perangkat KEP-12U berhenti. Rantai siap untuk siklus berikutnya.
Sebagai kesimpulan, kami akan mempertimbangkan dua skema untuk kendali jarak jauh dari penundaan relai waktu elektromagnetik.
Untuk mengubah penundaan dari panel kontrol, Anda dapat menggunakan rangkaian relai dua koil dengan koil pemicu KT.1 dan koil balik KT. 2 (demagnetisasi), yang MDS-nya diarahkan berlawanan (Gbr. 5, a). MDS dari koil pelepas disesuaikan menggunakan potensiometer RP. Untuk menghindari operasi berulang CT setelah pembalikan magnetisasi dikembalikan dan trip, MDS dari tripping coil harus kurang dari MDS yang cukup untuk menarik armature, atau kontak penutup relai sendiri harus dimasukkan ke dalam coil rangkaian (Gbr. 5, a).
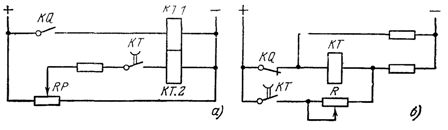
Gambar 5. Skema untuk penyesuaian waktu tunda relai jarak jauh
Menurut diagram pada gambar.5, b membuat perubahan jarak jauh dalam waktu tunda relai koil tunggal. Ketika kontak KQ terbuka, kumparan relai KT mengalir dengan arus degaussing yang diatur oleh resistor R. Saat arus degaussing meningkat, penundaan relai berkurang dan sebaliknya. Dengan tegangan suplai 220 V, relai dengan koil untuk tegangan nominal 110 V digunakan.