Sirkuit kontrol otomatis untuk memulai dan menghentikan motor DC
 Penyalaan mesin apa pun disertai dengan sakelar tertentu di sirkuit daya dan sirkuit kontrol. Dalam hal ini, kontaktor relai dan perangkat non-kontak digunakan. Untuk motor DC untuk membatasi memulai arus resistor start disertakan dalam rangkaian rotor dan angker motor, yang dimatikan saat motor dipercepat secara bertahap. Saat pengaktifan selesai, resistor pengaktifan sepenuhnya dilewati.
Penyalaan mesin apa pun disertai dengan sakelar tertentu di sirkuit daya dan sirkuit kontrol. Dalam hal ini, kontaktor relai dan perangkat non-kontak digunakan. Untuk motor DC untuk membatasi memulai arus resistor start disertakan dalam rangkaian rotor dan angker motor, yang dimatikan saat motor dipercepat secara bertahap. Saat pengaktifan selesai, resistor pengaktifan sepenuhnya dilewati.
Proses pengereman motor juga bisa otomatis. Setelah perintah berhenti, dengan bantuan peralatan kontaktor relai, sakelar yang diperlukan dibuat di sirkuit daya. Saat mendekati kecepatan mendekati nol, motor terputus dari jaringan. Selama pengaktifan, langkah-langkah dimatikan secara berkala atau bergantung pada parameter lainnya. Ini mengubah arus dan kecepatan motor.
Kontrol start motor dilakukan sebagai fungsi EMF (atau kecepatan), arus, waktu, dan jalur.
Subrakitan dan sirkuit tipikal untuk kontrol otomatis start motor DC
Memulai motor DC dengan eksitasi paralel atau independen dilakukan dengan resistor yang dimasukkan ke dalam rangkaian angker. Sebuah resistor diperlukan untuk membatasi arus lonjakan. Saat motor berakselerasi, resistor start diinjak. Saat penyalaan selesai, resistor akan dilewati sepenuhnya dan motor akan kembali ke karakteristik mekanis aslinya (Gbr. 1). Saat dinyalakan, mesin berakselerasi sesuai dengan karakteristik buatan 1, lalu 2, dan setelah menggerakkan resistor - sesuai dengan karakteristik alami 3.
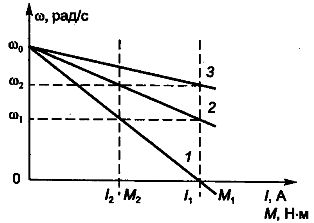
Beras. 1. Karakteristik mekanik dan elektromekanis motor DC dengan eksitasi paralel (ω — kecepatan sudut rotasi; I1 M1 — arus puncak dan torsi motor; I2 M2 — arus dan momen peralihan)
Pertimbangkan simpul rangkaian awal motor DC (DCM) dalam fungsi EMF (Gbr. 2).
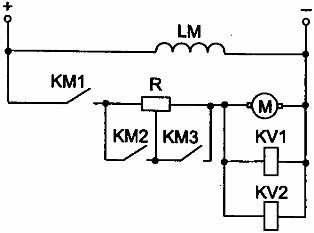
Beras. 2. Simpul rangkaian awal DCT eksitasi paralel dalam fungsi EMF
Fungsi EMF (atau kecepatan) dikendalikan oleh relai, tegangan, dan kontaktor. Relai tegangan dikonfigurasikan untuk beroperasi pada nilai ggl jangkar yang berbeda. Saat kontaktor KM1 dihidupkan, tegangan relai KV pada saat start tidak cukup untuk beroperasi. Saat motor berakselerasi (karena peningkatan ggl motor), relai KV1 diaktifkan, lalu KV2 (tegangan aktivasi relai memiliki nilai yang sesuai); mereka termasuk kontaktor akselerasi KM2, KMZ, dan resistor di sirkuit angker dilangsir (sirkuit pengalih kontaktor tidak ditunjukkan dalam diagram; LM adalah belitan eksitasi).
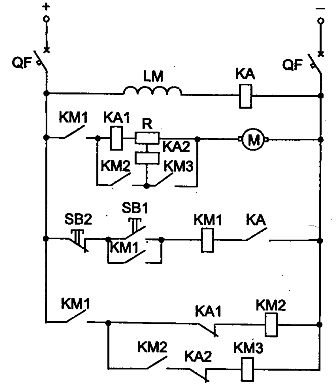
Mari kita lihat skema start motor DC pada fungsi EMF (Gbr. 3). Kecepatan sudut motor sering ditetapkan secara tidak langsung, mis.mengukur besaran yang berhubungan dengan kecepatan. Untuk motor DC, nilai tersebut adalah EMF. Awal dilakukan sebagai berikut. Pemutus sirkuit QF menyala, medan motor terhubung ke catu daya. Relai KA aktif dan menutup kontaknya.
Perangkat sirkuit yang tersisa tetap pada posisi aslinya. Untuk menyalakan mesin, Anda harus tekan tombolnya SB1 «Mulai», setelah itu kontaktor KM1 diaktifkan dan menghubungkan motor ke sumber listrik. Kontaktor KM1 adalah self-powered Motor DC dipercepat dengan rangkaian resistor jangkar motor R.
Saat kecepatan motor meningkat, ggl dan tegangan pada gulungan relai KV1 dan KV2 meningkat. Pada kecepatan ω1 (lihat Gbr. 1.) relai KV1 diaktifkan. Itu menutup kontaknya di sirkuit kontaktor KM2, yang trip dan hubung singkat tahap pertama dari resistor awal dengan kontaknya. Pada kecepatan ω2 relai KV2 diberi energi. Dengan kontaknya, ia menutup sirkuit suplai kontaktor KMZ, yang, ketika digerakkan, dengan kontak, membuat hubung singkat tahap awal kedua dari resistor awal. Mesin mencapai karakteristik mekanis alaminya dan berhenti lepas landas.
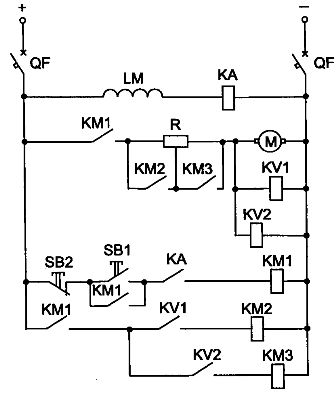
Beras. 3. Skema memulai DCT eksitasi paralel dalam fungsi EMF
Untuk pengoperasian rangkaian yang benar, relai tegangan KV1 perlu diatur untuk beroperasi pada EMF yang sesuai dengan kecepatan ω1 dan relai KV2 untuk beroperasi pada kecepatan ω2.
Untuk menghentikan mesin, tekan tombol Stop SB2. Untuk memutus sirkuit listrik, buka pemutus sirkuit QF.
Fungsi arus dikendalikan oleh relai arus. Perhatikan simpul rangkaian starter motor dc pada fungsi fluks. Dalam diagram yang ditunjukkan pada gambar.4, relai arus lebih digunakan, yang naik pada arus masuk I1 dan putus pada arus minimum I2 (lihat Gbr. 1). Waktu respons internal relai arus harus lebih kecil dari waktu respons kontaktor.
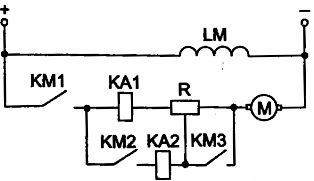
Beras. 4. Node rangkaian awal DCT eksitasi paralel tergantung pada arus
Akselerasi motor dimulai dengan resistor yang dimasukkan sepenuhnya ke dalam rangkaian angker. Saat mesin berakselerasi, arus berkurang, dengan arus I2, relai KA1 menghilang dan dengan kontaknya menutup sirkuit suplai kontaktor KM2, yang melewati kontak pertama resistor start dengan kontaknya. Demikian pula, tahap awal kedua dari resistor dihubung pendek (relai KA2, kontaktor KMZ). Sirkuit daya kontaktor tidak ditunjukkan dalam diagram. Di akhir pengasutan motor, resistor di rangkaian angker akan dijembatani.
Pertimbangkan rangkaian untuk menghidupkan motor DC sebagai fungsi fluks (Gbr. 5). Resistansi langkah-langkah resistor dipilih sedemikian rupa sehingga pada saat motor dihidupkan dan langkah-langkah shunt, arus I1 dalam rangkaian angker dan momen M1 tidak melebihi level yang diizinkan.
Menghidupkan motor DC dilakukan dengan menyalakan pemutus sirkuit QF dan menekan tombol «Mulai» SB1. Dalam hal ini, kontaktor KM1 diaktifkan dan menutup kontaknya. Arus masuk I1 melewati rangkaian daya motor, di bawah pengaruh relai arus lebih KA1 diaktifkan. Kontaknya terbuka dan kontaktor KM2 tidak menerima daya.
Beras. 5. Skema start-up DCT eksitasi paralel sebagai fungsi arus
Ketika arus turun ke nilai minimum I2, relai arus lebih KA1 turun dan menutup kontaknya.Kontaktor KM2 diaktifkan dan melalui kontak utamanya mem-shunt bagian pertama dari resistor awal dan relai KA1. Saat beralih, arus naik ke nilai I1.
Ketika arus naik lagi ke nilai I1, kontaktor KM1 tidak menyala, karena koilnya dilewati oleh kontak KM2. Di bawah pengaruh I1 saat ini, relai KA2 diaktifkan dan membuka kontaknya. Saat dalam proses percepatan arus kembali turun ke nilai I2, relai KA2 turun dan kontaktor KMZ menyala. Start selesai, mesin beroperasi dengan karakteristik mekanis alaminya.
Untuk fungsi sirkuit yang benar, waktu respons relai KA1 dan KA2 harus lebih kecil dari waktu respons kontaktor. Untuk menghentikan motor, tekan tombol «Stop» SB2 dan matikan pemutus sirkuit QF untuk memutuskan sirkuit.
Kontrol waktu dilakukan dengan menggunakan relai waktu dan kontaktor yang sesuai yang menghubungkan tahap resistor dengan kontaknya.
Perhatikan simpul rangkaian start motor DC sebagai fungsi waktu (Gbr. 6) Relai waktu KT segera diaktifkan ketika tegangan muncul di rangkaian kontrol melalui kontak bukaan KM1. Setelah membuka kontak KM1, relai waktu KT kehilangan catu dayanya dan menutup kontaknya dengan penundaan waktu. Kontaktor KM2, setelah interval waktu yang sama dengan waktu tunda, relai waktu menerima daya, menutup kontaknya, dan menghentikan resistansi di sirkuit angker.
Beras. 6. Node rangkaian awal DCT eksitasi paralel sebagai fungsi waktu
Keunggulan kontrol dalam fungsi waktu antara lain kemudahan kontrol, kestabilan proses akselerasi dan deselerasi, tidak adanya delay penggerak listrik pada kecepatan menengah.
Pertimbangkan rangkaian untuk memulai eksitasi paralel motor DC sebagai fungsi waktu. Dalam gambar. Gambar 7 menunjukkan diagram motor eksitasi paralel DC start ireversibel. Peluncuran berlangsung dalam dua tahap. Rangkaian ini menggunakan tombol SB1 «Mulai» dan SB2 «Berhenti», kontaktor KM1 ... KMZ, relai waktu elektromagnetik KT1, KT2. Pemutus QF menyala. Dalam hal ini, koil relai waktu KT1 menerima daya dan membuka kontaknya di sirkuit kontaktor KM2. Mesin dihidupkan dengan menekan tombol «Start» SB1. Kontaktor KM1 menerima daya dan dengan kontak utamanya menghubungkan motor ke sumber daya dengan resistor pada rangkaian angker.
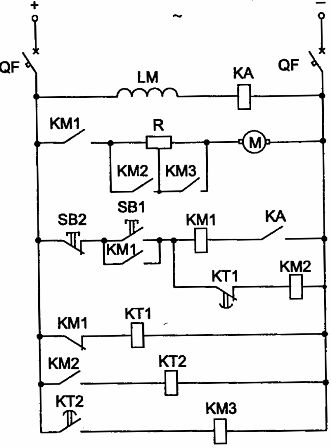
Beras. 7. Skema pengasutan motor DC yang ireversibel sebagai fungsi waktu
Relai arus bawah KA berfungsi untuk melindungi motor dari gangguan rangkaian eksitasi. Selama operasi normal, relai KA berenergi dan kontaknya di sirkuit kontaktor KM1 ditutup, mempersiapkan kontaktor KM1 untuk beroperasi. Saat rangkaian eksitasi putus, relai KA mati, membuka kontaknya, kemudian kontaktor KM1 mati dan mesin berhenti. Ketika kontaktor KM1 digerakkan, kontak pemblokirannya menutup dan kontak KM1 di sirkuit relai KT1 terbuka, yang mematikan dan menutup kontaknya dengan penundaan waktu.
Setelah interval waktu yang sama dengan waktu tunda relai KT1, sirkuit suplai dari kontaktor percepatan KM2 ditutup, yang dipicu dan dengan kontak utamanya dihubung pendek satu tahap dari resistor awal. Pada saat yang sama, relai waktu KT2 diberi energi. Mesin berakselerasi. Setelah selang waktu yang sama dengan penundaan relai KT2, kontak KT2 ditutup, kontaktor akselerasi KMZ diaktifkan dan dengan kontak utamanya menghubungi tahap kedua dari resistor awal di sirkuit angker. Start selesai dan mesin kembali ke karakteristik mekanis aslinya.
Unit sirkuit kontrol rem DC tipikal
Sistem kontrol otomatis motor DC menggunakan pengereman dinamis, pengereman berlawanan, dan pengereman regeneratif.
Dalam pengereman dinamis, belitan jangkar motor harus ditutup ke resistansi tambahan dan membiarkan belitan eksitasi diberi energi. Pengereman ini dapat dilakukan sebagai fungsi kecepatan dan sebagai fungsi waktu.
Kontrol sebagai fungsi kecepatan (EMF) selama pengereman dinamis dapat dilakukan sesuai skema yang ditunjukkan pada gambar. 8. Saat kontaktor KM1 dimatikan, angker motor terputus dari sumber listrik, tetapi ada tegangan pada terminalnya pada saat pemutusan. KV relai tegangan beroperasi dan menutup kontaknya di sirkuit kontaktor KM2, yang dengan kontaknya menutup armatur motor ke resistor R.
Pada kecepatan mendekati nol, relai KV kehilangan daya. Perlambatan lebih lanjut dari kecepatan minimum ke berhenti penuh terjadi di bawah aksi momen resistensi statis.Untuk meningkatkan efisiensi pengereman, dua atau tiga tahap pengereman dapat diterapkan.
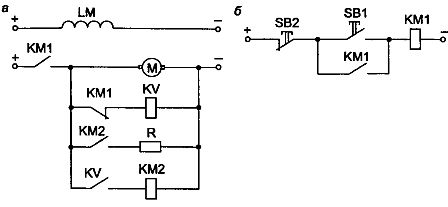
Beras. 8. Simpul sirkuit untuk kontrol otomatis pengereman dinamis dalam fungsi EMF: a — sirkuit daya; b - sirkuit kontrol
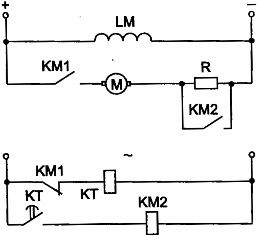
Pengereman dinamis eksitasi independen motor konstan sebagai fungsi waktu dilakukan sesuai dengan skema yang ditunjukkan pada gambar. sembilan.
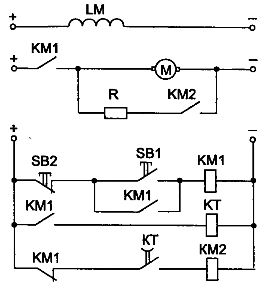
Beras. 9. Simpul sirkuit pengereman dinamis DCT eksitasi independen sebagai fungsi waktu
Saat mesin hidup, relai waktu KT menyala, tetapi sirkuit kontaktor rem KM2 terbuka. Untuk berhenti, Anda harus menekan tombol "Stop" SB2. Kontaktor KM1 dan relai waktu KT kehilangan daya; kontaktor KM2 aktif karena kontak KM1 pada rangkaian kontaktor KM2 tertutup dan kontak relai waktu KT terbuka dengan tunda waktu.
Untuk pengaturan waktu relai waktu, kontaktor KM2 menerima daya, menutup kontaknya dan menghubungkan angker motor ke resistor tambahan R. Penghentian dinamis motor dilakukan. Pada akhirnya, relai KT, setelah beberapa saat, membuka kontaknya dan memutuskan kontaktor KM2 dari jaringan. Pengereman lebih lanjut hingga berhenti total dilakukan di bawah pengaruh momen resistensi Ms.
Dalam pengereman terbalik, EMF motor dan voltase listrik bekerja sesuai. Untuk membatasi arus, sebuah resistor dimasukkan ke dalam rangkaian.
Kontrol eksitasi motor DC
Belitan medan motor memiliki induktansi yang signifikan dan jika motor dimatikan dengan cepat, tegangan besar dapat muncul di atasnya, yang akan menyebabkan kerusakan isolasi belitan. Untuk mencegahnya, Anda dapat menggunakan node sirkuit yang ditunjukkan pada gambar.10. Resistensi pemadam dihidupkan secara paralel dengan koil eksitasi melalui dioda (Gbr. 10, b). Oleh karena itu, setelah dimatikan, arus melewati resistansi untuk waktu yang singkat (Gbr. 10, a).

Beras. 10. Simpul sirkuit untuk menghidupkan resistansi pendinginan: a — resistansi pendinginan dihubungkan secara paralel; b — resistansi pendinginan dihidupkan melalui dioda.
Perlindungan terhadap gangguan rangkaian eksitasi dilakukan menggunakan relai arus bawah sesuai dengan skema yang ditunjukkan pada gambar. sebelas.

Beras. 11. Proteksi terhadap pemutusan sirkuit eksitasi: a — sirkuit eksitasi daya; b - sirkuit kontrol
Jika terjadi pemutusan pada koil eksitasi, relai KA matikan energi dan memutus rangkaian kontaktor KM.