Kontrol piston dari pergerakan mekanisme
Sirkuit relai
 Dalam gambar. 1 menunjukkan berbagai varian skema kontrol gerak piston langkah konstan yang ditetapkan oleh pengontrol SQ.
Dalam gambar. 1 menunjukkan berbagai varian skema kontrol gerak piston langkah konstan yang ditetapkan oleh pengontrol SQ.
Diagram pada gambar. 1, a-c digunakan ketika siklus terdiri dari satu gerakan "maju" B dan satu gerakan "mundur" H ke posisi awal. Skema 1, a dan b digunakan dengan perintah otomatis yang diberikan oleh relai KQ. Relai KT menyediakan jeda sebelum mulai mundur. Dalam diagram ara. 1, perintah mulai siklus diberikan oleh pengontrol atau saklar universal SM.
Untuk menerapkan gerakan bolak-balik tak terbatas, diagram pada gambar. 1, d Jika jumlah pukulan harus dibatasi oleh nilai yang diberikan n, kontak terbuka dari relai penghitung atau unit dari beberapa relai, yang menghitung pulsa yang disuplai oleh kontak penutup kontaktor "belakang" KM2, adalah termasuk dalam rangkaian kontaktor « maju» KM1.
Contoh implementasi gerakan bolak-balik dengan panjang stroke variabel di empat posisi ditunjukkan pada gambar. 2.Kontak SQ.1- SQ.4- dari perangkat perintah SQ digunakan untuk mematikan mekanisme di posisi 1—4 dari gerakan "maju", hubungi SQ.5- di posisi awal. Sirkuit menggunakan perintah pulsa yang diberikan oleh relai otomasi KQ1, yang ditutup, misalnya, saat memberi makan benda kerja, dan KQ2, yang menetapkan akhir operasi perantara di akhir setiap langkah.
Manuver berurutan SQ.1 — SQ.3 dari pengontrol SQ dilakukan oleh kontak relai untuk menghitung jumlah pergerakan mekanisme "belakang" KS1, KSZ dan KS5. Relai KS7, memperbaiki langkah keempat "mundur", mematikan relai KS1-KC6 dan melarang pengaktifan "maju" berikutnya hingga warna biru tiba di akhir operasi teknologi dengan grup kosong ini (relai KR). Kontak pembuka relai KR di sirkuit koil KC7 mengembalikan sirkuit ke keadaan semula.
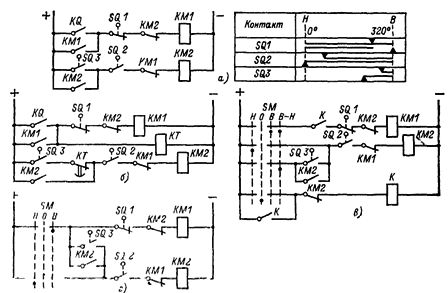
Beras. 1. Sirkuit kontrol relai untuk gerakan bolak-balik
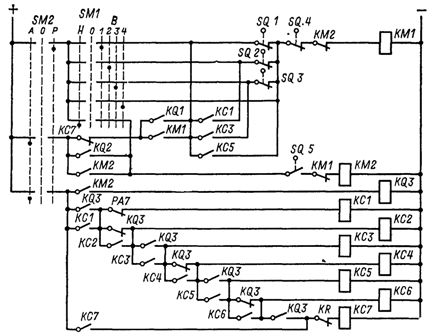
Gambar 2. Skema kontrol relai bolak-balik dengan panjang langkah variabel
Sirkuit logika
Sirkuit kontrol gerakan piston yang dibuat pada elemen seri «Logic T» ditunjukkan pada gambar. 3. Elemen D1-D3 tipe T-201 digunakan untuk mengoordinasikan sinyal relai input dengan elemen logika.
Memori elemen D4.1, D4.2 memperbaiki keberadaan perintah untuk bergerak "maju" saat relai KQ dihidupkan berdenyut. Melalui amplifier D5, kontaktor depan KM1 dihidupkan. Pada akhir pergerakan mekanisme "maju", ketika kontak pengontrol SQ 1 ditutup, sinyal 1 muncul di output elemen D2 yang sesuai, yang mematikan memori D4 dan kontaktor KM1 dan menyala memori pada elemen D6. Dalam hal ini, perintah untuk bergerak "kembali" diberikan dan diingat.Perintah ini dihapus dan gerakan mundur dihentikan ketika kontak pengontrol SQ 2 ditutup pada posisi awal, ketika sinyal 1 muncul pada keluaran elemen D3 yang sesuai, menonaktifkan memori D6.
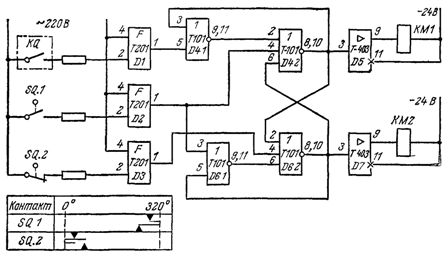
Beras. 3. Skema untuk mengontrol gerakan bolak-balik pada elemen rangkaian «Logic T»
Kenangan D4 dan D6 diblokir, jadi hanya satu yang dapat dihidupkan. Saat memori D4 aktif, sinyal 1 dari output elemen D4.2 diumpankan ke input 2 elemen D6.2, menonaktifkan memori D6 dan sebaliknya. Saat memori D6 dihidupkan, sinyal 1 dari output elemen D6 2 diumpankan ke input 6 elemen D4.2, menonaktifkan memori D4.