Sirkuit kontrol penggerak listrik
 Bergantung pada kecepatan lift penumpang, jenis sirkuit kontrol daya berikut diadopsi:
Bergantung pada kecepatan lift penumpang, jenis sirkuit kontrol daya berikut diadopsi:
-
elevator berkecepatan rendah memiliki sangkar tupai atau motor fase rotor dan tombol atau tuas kontrol,
-
elevator berkecepatan tinggi-motor dua atau satu kecepatan yang dikendalikan oleh stasiun magnet atau stasiun kontrol thyristor (TSU-R) dengan tombol kontrol,
-
elevator berkecepatan tinggi dan berkecepatan tinggi - motor DC yang dikendalikan oleh sistem "generator - motor" dengan skema eksitasi yang berbeda atau oleh sistem "konverter thyristor - motor" dengan tombol,
-
rantai kaskade katup asinkron (AVK) juga dapat digunakan, yang penggunaannya memungkinkan untuk meningkatkan efisiensi. instalasi.
Lift penumpang, tergantung pada arus penumpang, ketinggian angkat dan jumlah lift yang melayani penumpang, dibagi menjadi kontrol tunggal dan grup.
Lajang meliputi:
a) elevator yang beroperasi atas perintah dan panggilan tunggal tanpa penyeberangan berhenti selama penurunan dan kenaikan penumpang,
b) lift dengan naiknya penumpang saat turun, tetapi dengan larangan menelepon saat naik,
c) sama, tetapi dengan registrasi panggilan saat turun dengan eksekusi selanjutnya.
Lift yang dioperasikan grup meliputi:
a) elevator dengan satu tombol untuk memanggil tempat pendaratan, terlepas dari jumlah elevator yang terpasang (kontrol ganda lebih sering digunakan) dan dengan penumpang naik saat turun,
b) sama, tetapi dengan pengumpulan penumpang yang lengkap di lantai tengah untuk naik dan turun (biasanya dipasang di gedung administrasi, pendidikan, dan lainnya).
Selain itu, sangat umum untuk mengirim elevator ke sejumlah rumah dan seluruh lingkungan, ketika keadaan sirkuit dipantau dari satu konsol pengiriman dan beberapa elevator dikendalikan.
Terlepas dari kecepatan elevator, kontrol tunggal atau grupnya, elemen yang diperlukan dari sebagian besar skemanya adalah sebagai berikut:
-
tombol pengatur sendiri, tombol tempel atau penutup untuk memanggil taksi dan memberi perintah dari taksi,
-
berbagai sensor pilihan dan perangkat pencocokan berhenti yang tepat untuk mendaftarkan lokasi kabin dan keadaan sirkuit listrik,
-
sensor dan interlock untuk keadaan tali pengangkat, keadaan tambang dan pintu kabin (terbuka atau tertutup),
-
limit switch untuk membatasi kecepatan dan derajat beban kabin,
-
indikator arah pergerakan mobil dan, di beberapa elevator, adanya beban di dalam mobil.
Dari poin-poin ini, kami akan membahas lebih detail tentang perangkat pencocokan posisi (PSC), yang menentukan tempat di mana mobil tambang harus berhenti ketika ada panggilan atau perintah, dan pergerakannya naik atau turun.Item yang tersisa biasanya berbagai modifikasi limit switch yang diketahui dari kursus lain.
Secara struktural, perangkat pencocokan posisi diimplementasikan dalam bentuk seperangkat sensor elektromekanis atau induktif atau magnet (buluh) tiga posisi yang terletak di tambang, dengan keluaran sinyal ke relai atau pemilih non-kontak di ruang mesin (CCP terkadang diterapkan berupa unit lantai tengah yang terletak di ruang mesin) …
Sensor yang terletak di tambang berinteraksi dengan cabang yang dipasang di kabin (untuk elektromekanis) atau shunt magnetik (untuk sakelar induktif atau buluh) dan mengirim sinyal ke unit lantai pusat (mesin fotokopi langkah atau relai relai) yang dipasang di ruang mesin, dan terakhir mentransmisikan dan sirkuit kontrol — sinyal untuk mengeksekusi perintah yang diterima.
Lebih bijaksana untuk menempatkan sensor untuk sinyal pergerakan mobil ke atas atau ke bawah mobil (diperlukan lebih sedikit kabel) dan memasang pirau magnet di tambang pada titik-titik yang diperlukan. Dalam hal ini, dengan kontrol digital, jumlah kolom dengan shunt terpasang di sepanjang poros sama dengan jumlah bit nomor lantai yang ditransmisikan dalam kode biner atau lainnya.
Sakelar elektromekanis tiga posisi dipindahkan ke salah satu posisi yang sesuai dengan pergerakan kabin ke atas atau ke bawah, atau pemberhentiannya, dengan pengaturan melengkung.Dalam hal ini, saat mobil bergerak, kontak sakelar di lantai yang dilewati dihidupkan ke salah satu posisi ujung, mempersiapkan aksi rantai panggilan dan perintah, dan saat mobil berhenti, sakelar itu dipindahkan ke posisi tengah, mematikan sirkuit kontrol dari kontaktor arah dan dengan demikian mengecualikan mobil dari meninggalkan lantai saat tombol perintah atau panggilan ditekan secara tidak sengaja.
Untuk memastikan pengereman mobil elevator yang relatif akurat, baru-baru ini sensor induktif non-kontak atau sensor yang dikontrol secara magnetis (buluh) yang disegel kontak mulai digunakan di sirkuit kontrolnya. Sensor ini dipasang baik di tambang maupun di kabin: di tambang terdapat sensor untuk pemilihan (perlambatan), dan di kabin terdapat sensor untuk penghentian yang tepat. Untuk berinteraksi dengan sensor, shunt selektif magnetik lentera ditempatkan di kokpit, dan shunt penghenti presisi feromagnetik ditempatkan di poros (di setiap lantai).
Sensor induktif terdiri dari sirkuit magnetik berbentuk U terbuka dengan koil tertutup di rumahan. Gulungan relai eksekutif dihubungkan secara seri dengannya dan tegangan arus bolak-balik (U) diterapkan padanya.
Dengan rangkaian magnet terbuka, fluks magnet yang melintasi koil kecil. Oleh karena itu e.m.f. dan arus induksi sendiri pada kabel koil, serta resistansi induktif (X) yang disebabkan olehnya, praktis tidak ada, sehingga resistansi koil aktif (R). Arus dalam kumparan yang terhubung seri relatif besar; meniru penutupan kontak dalam sistem kontak (relai menyala).
Ketika shunt menutup sirkuit magnetik berbentuk U, fluks magnet yang melintasi kumparannya meningkat dan karenanya ggl meningkat. induktansi diri serta resistansi induktif kumparan karena itu. Akibatnya, arus dalam kumparan yang terhubung secara seri berkurang, mensimulasikan pembukaan sirkuit dalam sistem kontak (relai eksekutif dimatikan).
Sakelar buluh adalah badan berbentuk U di mana di satu sisi alur ditempatkan dua labu kaca tertutup dengan ruang hampa di dalamnya dan kontak dipasang pada pelat pegas yang terhubung ke sirkuit kontrol elevator masing-masing. Di sisi lain slot terdapat magnet permanen. Elemen kerja dari sensor tersebut adalah shunt feromagnetik yang melewati potongan berbentuk U saat mobil elevator bergerak.
Prinsip pengoperasian sensor ini adalah sebagai berikut: gaya pegas pelat kontak sakelar buluh diarahkan sehingga jika medan magnet permanen tidak bekerja padanya, maka kontak yang biasanya terbuka akan terbuka, dan biasanya kontak tertutup ditutup, mis. sirkuit yang terhubung dengan kontak ini akan dibuka atau ditutup.
Kondisi reed switch ini adalah ketika ferromagnetic shunt berada pada lekukan benda berbentuk U, karena garis medan magnet magnet permanen tertutup melintang shunt. Begitu shunt keluar alur, garis medan magnet tertutup melintang pelat, mengatasi aksi pegasnya, dan kontak saklar buluh, dan oleh karena itu sirkuit yang terhubung dengannya, masuk ke keadaan berlawanan.

Sebagai contoh yang mencerminkan fitur utama skema kontrol lift, pertimbangkan skema kontrol untuk lift tunggal tanpa pemberhentian terkait yang ditunjukkan pada Gambar. 1. Lift melayani empat lantai; motor asinkron dua kecepatan M digunakan sebagai motor eksekutif.
Dimasukkannya putaran motor rendah (Ml) atau tinggi (B) dilakukan oleh kontaktor yang sesuai Ml dan B. Arah putaran motor ditentukan oleh kontaktor B dan H, perlambatan — oleh resistor tambahan P, berhenti — oleh rem elektromagnetik ET.
Digunakan sebagai sakelar lantai sensor induktif non-kontak (DTS, DTOV dan DTON) dihubungkan secara seri dengan kumparan relai (RIS, RITOV, RITON). Sensor TTP digunakan untuk menghidupkan penggerak elevator ke kecepatan tinggi dan memberikan dorongan untuk melambat, sedangkan sensor DTOV dan DTON dirancang untuk menghentikan elevator dengan tepat di lantai lantai yang sesuai dan ditempatkan di mobil, shunt magnetik untuk mereka dipasang di poros poros.
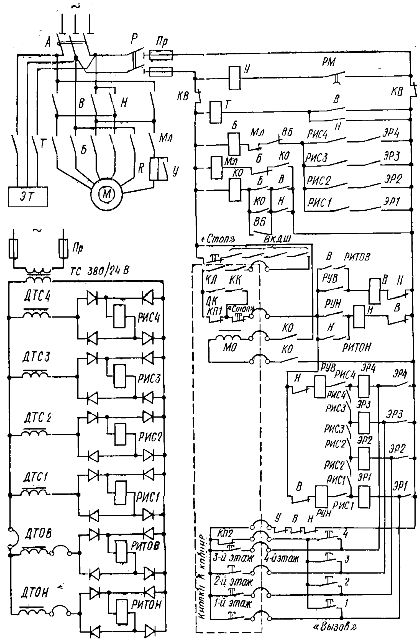
Beras. 1. Diagram skematis dari kontrol elevator tunggal
Mari kita pertimbangkan tujuan dari elemen sirkuit yang tersisa dan operasinya menggunakan contoh pemindahan kabin dengan penumpang dari lantai 1 ke lantai 3, dengan asumsi bahwa mesin otomatis A, pemisah P dan sakelar batas KB membatasi pergerakan kabin naik turun dalam mode darurat, ditutup dan kabin berada di lantai dasar. Dalam hal ini, gulungan relai RIS, selain relai lantai pertama, mengalir dari arus pengenal.
Ketika tombol «lantai 3» ditekan, rangkaian listrik berikut terbentuk: fase jaringan — tiang pemisah P — sekering Pr — sakelar batas KB — tombol «Berhenti» — penguncian pintu tambang D1 — D4 — kontak untuk penegangan tali KK — sakelar batas keamanan KL — sakelar pintu kabin DK — kontak tombol «Stop» — blok pembuka -kontak Н — koil relai RUV — kontak penutup relai RIS4 dan RISZ (kumparan relai ini membawa arus) — koil relai lantai ERZ — tombol «lantai 3» — blok pembuka — kontak kontaktor U, B, N — sakelar batas KB — sekering R — tiang pemisah P — fase jaringan.
Setelah relai RUV dan ER3 aktif, kontaktor gerak maju B, kontaktor gerak cepat B (pada rangkaian koil B — kontak blok ML — sakelar kecepatan tinggi VB — kontak relai RISZ dan ER3) dihidupkan. Ketika kontak B dan B ditutup, motor dihubungkan ke sumber listrik, kontaktor T, katrol pelepas dan kontaktor shunt KO, yang menyalakan MO solenoid shunt dan menyiapkan rangkaian koil kontaktor kecepatan rendah Ml, adalah diaktifkan. Stroke ditarik kembali, melepaskan tuas pengunci dan kabin mulai bergerak.
Saat kabin mendekati lantai tiga, shunt feromagnetik menutup koil sensor TTSZ, resistansinya meningkat, dan relai RISZ menghilang, mematikan relai ER3 dan RUV. Akibatnya kontaktor B menghilang, menutup kontaknya, menyalakan kontaktor kecepatan rendah Ml, dan kontaktor B tetap menyala, karena saat mobil melaju, rangkaian magnet sensor rem presisi belum tertutup, oleh karena itu, Kontak RITOV masih belum dibuka.Motor dihentikan pada kecepatan rendah yang beroperasi dalam mode generator dengan resistor R. dimasukkan dalam satu fase stator.
Segera setelah lantai mobil sejajar dengan lantai lantai, shunt magnet menutup sirkuit magnet koil sensor penghenti DTOV yang tepat, relai RITOV menghilang dan kontaktor B, lalu KO dan akhirnya ML diputar Akibatnya, elektromagnet motor dan rem terputus dari listrik, rem mekanis diaktifkan dan kabin dihentikan.
Untuk mempelajari skema kolektif untuk mengendalikan elevator dengan pemberhentian yang lewat hanya saat menurunkan mobil atau skema kolektif penuh, mis. saat melintas berhenti saat mobil bergerak naik turun, perlu skema serupa dengan yang dibahas pada gambar. 1, perkenalkan beberapa tambahan. Misalnya, dalam rangkaian motor dua kecepatan, sensor induktif ID, relai RIS, dan tombol panggil dan pesan di setiap lantai dimasukkan seperti yang ditunjukkan pada Gambar. 2.
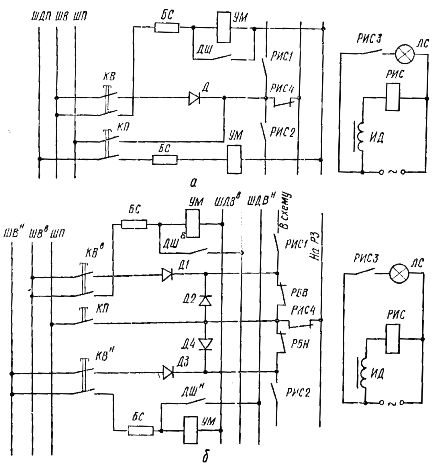
Beras. 2. Fragmen penambahan skema kontrol elevator kolektif (satu lantai)
Dalam skema dengan pemberhentian lewat saat menurunkan kabin (Gbr. 2, a), panggilan dan perintah diberikan dengan tombol tempel terpisah dan oleh karena itu dapat didaftarkan kapan saja dan dikirim ke skema segera, kecuali untuk periode pergerakan kabin. kabin dengan penumpang naik ketika bus pasokan dari kontak transfer panggilan ke sirkuit eksekutif dimatikan oleh kontak selektif dari bus positif.
Dalam skema kontrol selektif lengkap (Gbr. 2, b) ada tambahan sirkuit dering untuk naik (ШДВв) dan menurunkan (ШДВн) kabin, kontak relai pemblokiran RBV dan RBN terhubung ke kontak sirkuit eksekutif sirkuit penampang selektif .
Dalam diagram yang ditunjukkan pada Gambar. 1 dan 2, dengan tidak adanya kabin di lantai, gulungan sensor induktif ID dan relai RIS diberi energi. Oleh karena itu, ketika Anda menekan tombol perintah perintah atau memanggil KV (mereka ditahan dalam keadaan aktif oleh magnet penahan UM sampai diatasi oleh kontak pintu tambang di lantai DSh ini), sebuah sirkuit terbentuk (bukan ditunjukkan pada gambar) yang meliputi RUV relai kontrol atas jika lantai tujuan lebih tinggi dari lantai tempat parkir, atau LVL relai kontrol bawah jika lantai tujuan berada di bawah tempat parkir.
Setelah mobil tiba di lantai panggilan, ID sensor induktif dilepaskan, relai RIS dimatikan, membuka kontaknya, yang mematikan relai RUV atau RUN dan lampu LS (mobil berhenti), dan dengan menutup kontak RIS4, sirkuit disiapkan untuk eksekusi perintah yang datang dari mobil.
Dalam sirkuit kolektif lengkap, sirkuit yang dibagi oleh kontak RIS1 dan RIS2 di lantai tempat parkir mobil tidak hanya diputus oleh kontak ini, tetapi juga oleh kontak relai pemblokiran ke atas RBV atau ke bawah RBN (kumparannya tidak ditunjukkan dalam diagram), dan sirkuit penaikan, penurunan, dan pengurutan dipisahkan satu sama lain dengan memisahkan dioda D1 - D4.
Sebelum menekan tombol panggil atau pesan, jika arah perjalanan kendaraan belum dipilih, semua kontak di sirkuit pemilihan arah ditutup, kecuali kontak RIS4 di lantai parkir.Oleh karena itu, ketika salah satu tombol ini ditekan, sinyal panggilan dari lantai yang terletak di atas lantai tempat parkir mobil dihubungkan ke koil RUN, dan sinyal panggilan dari lantai di bawah tempat parkir termasuk RUV relai. Setelah arah dipilih, bersamaan dengan relai RUV atau LVL, salah satu relai pemblokiran arah berlawanan RBV atau RBN menyala, yang menyela output melalui sirkuit penampang sinyal panggilan non-transien dengan kontaknya.
Dalam skema yang ditunjukkan pada gambar. 2, a, untuk menurunkan penumpang, kabin berjalan tanpa henti ke lantai percakapan tertinggi dan kemudian turun dengan berhenti, dan dalam diagram yang ditunjukkan pada gambar. 2, b, jika perlu untuk menjemput penumpang, kabin naik ke lantai panggilan paling bawah, lalu naik dengan berhenti lewat.
Dalam skema yang dipertimbangkan, pemilih dibuat pada elemen relai. Bersamaan dengan ini, penyeleksi lain digunakan: kamera, fotolistrik, pelacakan sikat kontinu, pijakan, pada elemen statis, dll.
Dengan arus penumpang yang besar, beberapa lift dipasang di satu koridor, yang menggabungkan kontrol berpasangan atau berkelompok untuk meningkatkan kenyamanan dan meningkatkan tenaga. Jumlah elevator yang terhubung dalam grup biasanya tidak melebihi empat, tetapi lebih sering tiga, meskipun sistem diketahui berisi hingga delapan elevator dalam satu grup.
Dalam kontrol grup, biasanya ada tiga mode utama pengoperasian elevator: pendakian puncak, penurunan puncak, dan gerakan seimbang di kedua arah. Aktivasi elevator untuk satu atau mode lain dilakukan oleh operator atau secara otomatis melalui jam pemrograman yang dipasang untuk setiap grup elevator.
Di gedung-gedung tinggi, setiap kelompok elevator ditetapkan untuk melayani area lantai tertentu, lantai lain tidak dilayani olehnya. Jika ada beberapa elevator dalam grup yang melayani satu area atau gedung bertingkat rendah, untuk meningkatkan kecepatan rata-rata pergerakan dengan mengurangi jumlah perhentian, elevator terpisah dapat dialokasikan untuk melayani lantai genap dan ganjil.
Untuk melakukan kontrol lift ganda atau grup, sirkuit kontrolnya harus kolektif dan panggilan ke setiap lantai di kedua arah harus didaftarkan secara terpisah di setiap arah oleh perangkat penyimpanan yang sesuai yang berisi relai, transistor, dll.
Sebagai contoh yang mencerminkan kekhususan operasi dalam kontrol berpasangan elevator dengan relai parkir tambahan dari elevator 1PC pertama dan elevator 2PC kedua, pertimbangkan penggalan diagram skematik yang ditunjukkan pada gambar. 3.
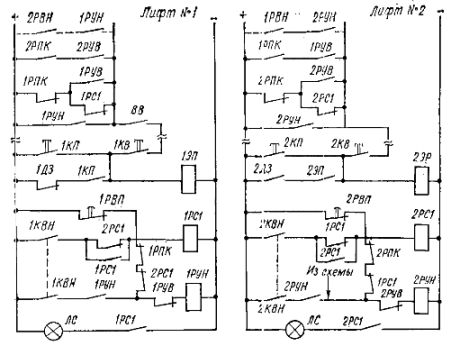
Beras. 3. Fragmen diagram skematik dari kontrol elevator berpasangan: ER — relai lantai, RPK — relai pengalihan saluran, relai mulai otomatis RVP
Dalam hal ini, mobil yang turun dengan penumpang di lantai satu tidak menjawab panggilan dari lantai lain dan menunggu penumpang. Jika tidak ada mobil di lantai satu, maka mobil yang naik atas perintah dan dilepas otomatis dikirim ke lantai satu, dan saat mobil lain diturunkan atau diparkir, mobil terakhir tetap berada di lantai pada akhir penerbangan. atau pergi ke pusat pemuatan dan digunakan untuk operasi panggilan terutama ke arah tenggelam.
Relai parkir kabin lantai pertama 1PC1 atau 2PC1 dihidupkan setelah kedatangan kabin lantai pertama dari sakelar batas 1KVN atau 2KVN (dipasang di tambang mesin fotokopi). Relai ini diblokir.Oleh karena itu, masuknya salah satunya menandakan bahwa mobil ini tiba di lantai satu lebih awal dari yang lain. Dalam hal ini, relai 1PC1 atau 2PC1 dengan kontak penutupnya menyalakan lampu sinyal LS dan dengan kontak pembukanya memutus sirkuit dering liftnya, memutus panggilan saat mobil diparkir di lantai pertama.
Ketika mobil meninggalkan lantai pertama, lampu sinyal LS-nya padam, daya ke sirkuit yang disebut lift ini dipulihkan segera setelah mobil dilepaskan, dan setelah mobil lift lain tiba di lantai pertama, relai komputernya adalah dihidupkan. Kabin ini tetap berada di lantai dasar dan menunggu penumpang (yang ditandai dengan menyalakan lampu peringatan LS). Ketika mobil yang naik sesuai pesanan dilepaskan dan tidak ada panggilan, sinyal dikirim ke sirkuit yang menyalakan koil relai 1RUN atau 2RUV 1RUN atau 2RUV melalui kontak pembuka sakelar batas 1KVN atau 2KVN, dan mobil pergi ke lantai pertama, dan t .n.
Peralatan kontrol motor dari elevator kontrol tunggal, ganda, dan grup biasanya terletak di panel, stasiun, atau unit kontrol tipikal yang dipasang di ruang mesin.