Peralatan listrik mesin bor CNC
 Peralatan listrik mesin bor CNC akan dipertimbangkan pada contoh model mesin 2R135F2.
Peralatan listrik mesin bor CNC akan dipertimbangkan pada contoh model mesin 2R135F2.
Mesin bor CNC model 2R135F2 dirancang untuk memproses bagian tubuh, serta bagian seperti «flange», «penutup», «pelat», «braket» dan lainnya. Mesin memungkinkan pengeboran, pengeboran, countersinking, threading dan operasi lainnya.
Tampilan umum mesin ditunjukkan pada gambar.
Benda kerja yang akan diproses dipasang di atas meja. Menara ini dapat menampung enam instrumen. Saat menentukan pemesinan, tabel bergerak sepanjang sumbu X, Y ke posisi yang ditentukan oleh program. Setelah tabel diinstal, dukungan diaktifkan.
Pergerakan slider selama pemesinan adalah menuruni sumbu Z sesuai dengan program. Penggeser kembali ke posisi semula hingga sakelar batas digerakkan. Pergantian pahat dilakukan dengan memutar turret ke posisi slide atas.
Pergerakan spasial di sepanjang sumbu meja dan sumbu geser dikendalikan oleh sensor posisi, informasi berkelanjutan yang darinya ditransmisikan ke blok CNC. Turret berisi enam sakelar ujung yang menentukan posisi kerja salah satu alat.
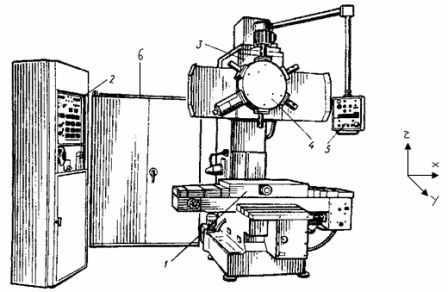
Ara. 1. Tampilan umum mesin: 1 — meja, 2 — perangkat CNC, 3 — penyangga, 4 — menara, 5 — panel kontrol, 6 — kabinet untuk otomatisasi relai.
Peralatan listrik mesin terdiri dari kabinet otomasi relai, perangkat kontrol numerik (CNC), dan mesin serta perangkat yang dipasang langsung pada struktur mesin.
Kabinet listrik berisi:
1 — panel relai tempat relai perantara dan relai untuk komunikasi dengan unit CPU dipasang,
2 - panel daya, tempat konverter thyristor yang dikontrol, transformator, starter magnet, perangkat pelindung, penyearah catu daya dipasang,
3 — sakelar input untuk menghubungkan mesin ke jaringan listrik.
Mesin dilengkapi dengan:
1 — motor listrik,
2 — cengkeraman elektromagnetik dari tipe ETM untuk mengatur kecepatan pergerakan benda kerja mesin,
3 — sensor umpan balik untuk memantau posisi organ kerja mesin,
4 — batasi sakelar, batasi jangkauan gerakan badan kerja mesin,
5 — panel kontrol dengan tombol dan indikator,
6 — lampu untuk menerangi area kerja pemrosesan.
Drive carriage dikendalikan oleh konverter thyristor, yang menyediakan operasi motor DC yang diatur dalam mode pengumpanan terprogram. Kopling elektromagnetik memberikan gerakan kaliper yang cepat dan lambat selama pemosisian dan penghentian.
Penggerak penggerak utama (spindel) berisi motor listrik asinkron yang tidak diatur dan kotak roda gigi otomatis dengan cengkeraman elektromagnetik, yang menyediakan 19 putaran spindel.
Pergerakan meja dilakukan sepanjang dua sumbu koordinat dengan bantuan motor listrik asinkron. Kecepatan pergerakan meja diatur oleh cengkeraman pada sumbu X dan Y. Kopling menyediakan gerakan cepat, lambat, dan berhenti dari penggerak meja.
Menara ini digerakkan oleh motor listrik. Mengencangkan dan memeras kepala dilakukan dengan menggunakan kopling.
Karakteristik teknis motor listrik penggerak mesin bor CNC ditunjukkan pada Tabel 1.

Diagram blok umum dari kontrol terprogram dari organ kerja mesin ditunjukkan pada gambar. 2.
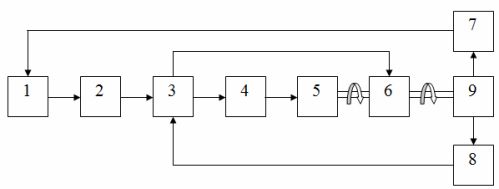
Beras. 2. Diagram blok untuk mengendalikan organ kerja mesin: 1 — CNC, 2 — blok relai kode, 3 — blok relai perantara, 4 — blok starter magnet, 5 — motor listrik, 6 — blok cengkeraman elektromagnetik, 7 — sensor untuk posisi badan kerja mesin, 8 — sakelar jalan, 9 — badan kerja mesin.
Di sirkuit kontrol carriage terdapat konverter terkontrol tambahan, yang memberikan kemampuan untuk menyesuaikan kecepatan putaran motor dengan mulus.
Dimasukkannya objek apa pun ke dalam mesin dapat dilakukan dari panel kontrol mesin atau dari perangkat CNC.
Perintah kontrol CNC diterjemahkan oleh relai kode di unit relai. Relai yang diaktifkan menghasilkan sinyal yang diumpankan ke relai perantara.Relai ini termasuk cengkeraman elektromagnetik atau starter magnet yang mengontrol pengoperasian motor listrik.
Pemosisian meja dan slide dilakukan pada nilai tetap dari kecepatan gerakan. TNC membandingkan jarak dari posisi benda kerja yang sebenarnya dengan yang diprogram dengan pengaturan. Jika jarak ini sama dengan nilai yang ditetapkan, kecepatan gerakan akan berubah. Drive dihentikan pada titik program.
Bagian ini dikerjakan dengan laju pengumpanan slide yang dapat diprogram.
Nyalakan peralatan listrik mesin
Peralatan listrik mesin terhubung ke listrik melalui pemutus sirkuit input. Pasokan tegangan ke semua sirkuit penggerak mesin dilakukan oleh kontaktor saat tombol «Mulai» ditekan. Mematikan dilakukan dengan menggunakan tombol «Stop». Motor spindel, meja, dan menara ditenagai oleh pemutus sirkuit. Untuk memulai, Anda harus menyalakan pemutus sirkuit dan menekan tombol «Mulai».
Manajemen kaliper
Penggerak elektrik menyediakan pergerakan penggeser di sepanjang sumbu Z dalam sistem koordinat alat berat. Penggerak caliper elektrik beroperasi dalam mode pemosisian dan pemesinan. Mode pemosisian bawah melibatkan perjalanan cepat ke jarak yang ditentukan oleh titik setel, diikuti dengan perjalanan lambat ke permukaan benda kerja, asalkan kecepatan dikurangi dalam dua tahap.
Umpan laju yang dapat diprogram dilakukan ke arah bawah selama pemesinan (mis. pengeboran). Gerakan lambat terjadi saat pahat ditarik dari benda kerja ke permukaan dengan arah ke atas.Retraksi pahat "naik" dari benda kerja ke posisi awal dilakukan dalam mode traverse cepat.
Pengaturan kecepatan gerakan dilakukan dengan menggunakan dua kopling elektromagnetik (masing-masing gerakan cepat dan lambat) dan dengan mengubah kecepatan putaran motor dengan mengubah resistansi nilai yang ditetapkan pada input konverter yang dikendalikan. Regulator adalah potensiometer yang terdiri dari satu set resistor yang dihubungkan secara seri.
Dalam mode pemosisian, kecepatan gerakan cepat dan lambat ditetapkan. Dalam mode pengumpanan, kecepatan disesuaikan dengan nilai terprogram dari kode yang berasal dari CNC. Sinyal kontrol dari unit CNC diumpankan ke relai penerima, yang dengan kontaknya mengalihkan berbagai sirkuit di sirkuit kontrol drive.
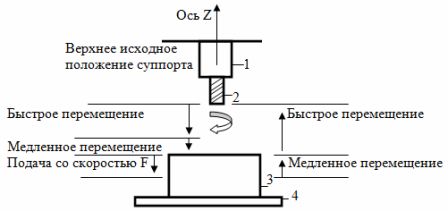
Beras. 3. Diagram pergerakan penyangga saat memproses bagian: 1 — penyangga, 2 — alat, 3 — bagian, 4 — meja.
Kontrol gerak dasar
Penggerak spindel berisi motor listrik asinkron reversibel, gearbox otomatis (AKS) dengan cengkeraman elektromagnetik. Motor gerak utama dalam semua operasi pemesinan, kecuali threading, berjalan terus menerus, dengan arah putaran yang benar (searah jarum jam).
Saat motor dibalik dalam mode threading, pengaturan waktu disediakan oleh relai pengaturan waktu yang memungkinkan arah putaran terbalik. Saat relai waktu aktif, pengaturan arah baru tidak dimungkinkan.
Rotasi dari motor ke spindel ditransmisikan melalui roda gigi AKC yang dikendalikan oleh cengkeraman elektromagnetik. Kopling menyediakan penyesuaian kecepatan rotasi tertentu.Biner - Kode kecepatan desimal diumpankan ke relai. Kontak relai ini membentuk dekoder kode kecepatan spindel dan menyalakan cengkeraman elektromagnetik.
Kontrol penggerak meja
Tabel bergerak sepanjang sumbu X, Y dari sistem koordinat mesin. Gerakan ini disediakan oleh dua motor asinkron yang dapat dibalik. Kontrol kecepatan meja adalah dua tahap. Pergerakan cepat dan lambat selama pemosisian meja dilakukan melalui cengkeraman elektromagnetik yang menyertakan roda gigi pada peredam.
Sinyal arah diterima dari modul CNC: "kanan" pada sumbu X, "maju" pada sumbu Y, dan sinyal kecepatan "cepat" atau "lambat". Relai penerima dihidupkan sesuai dengan sinyal dari unit CNC, yang pada gilirannya menyalakan skrup dan kontaktor gerak yang sesuai. Kontaktor memastikan koneksi motor ke sirkuit daya. Saat kontaktor dimatikan, kopling rem diaktifkan, memperbaiki posisi meja pada posisi yang ditentukan. Pergerakan tabel di sepanjang koordinat dibatasi oleh sakelar batas.
Kontak relai dimasukkan ke dalam rangkaian koil kontaktor, memberikan penundaan waktu untuk mengatur arah putaran balik saat motor dibalik. Saat relai ini aktif, arah rotasi baru tidak dapat diatur.
Kontrol menara
Penggerak turret menyediakan penggantian pahat dengan memutar turret. Penggerak berisi motor listrik dua kecepatan asinkron dan kopling elektromagnetik. Kopling yang terlepas mengaktifkan turret pada posisi pengoperasian. Perubahan posisi kepala terjadi setelah dilepaskan.
Proses mengencangkan dan melonggarkan head dilakukan oleh motor listrik berkecepatan rendah saat belitan stator dihubungkan sesuai dengan skema «delta». Dalam hal ini, kopling harus diaktifkan. Perputaran kepala dilakukan oleh motor dengan kecepatan tinggi (skema bintang ganda), juga dengan kopling terpasang.
Kontaktor dan kopling menyala saat kode pahat diterima. Jika kode tidak sesuai dengan posisi kepala, proses penggantian pahat dimulai.