Elektromagnet rem untuk derek
 Elektromagnet rem dirancang untuk mengontrol rem mekanis. Pada gilirannya, rem ini berfungsi untuk menghentikan mekanisme derek pada posisi tertentu atau membatasi jarak pengereman jika terjadi kebocoran dengan motor penggerak dimatikan.
Elektromagnet rem dirancang untuk mengontrol rem mekanis. Pada gilirannya, rem ini berfungsi untuk menghentikan mekanisme derek pada posisi tertentu atau membatasi jarak pengereman jika terjadi kebocoran dengan motor penggerak dimatikan.
Rem sepatu dan pita paling banyak digunakan untuk mekanisme derek (jika perlu, miliki momen pengereman di atas 10 kN NS m) — pegas dan terkadang beban. Rem cakram lebih jarang digunakan (momen pengereman hingga 1 kN x m) dan berbentuk kerucut (momen pengereman hingga 50 N NS m).
Kumparan elektromagnet rem menyala bersamaan dengan motor listrik dan melepaskan rem. Saat motor listrik dimatikan, kumparan solenoida rem secara bersamaan dinonaktifkan dan pengereman terjadi — rem dikencangkan di bawah aksi pegas atau beban.
Elektromagnet rem dengan arus bolak-balik digunakan untuk rem mekanisme derek: seri KMT tiga fase (Gbr. 1) langkah panjang (langkah angker maksimum dari 50 hingga 80 mm), seri MO fase tunggal (Gbr.2)-stroke pendek (stroke batang rem dari 3 hingga 4 mm), arus searah: seri KMP dan VM — stroke panjang (stroke armatur dari 40 hingga 120 mm), seri MP (Gbr. 3) — stroke pendek ( stroke jangkar dari 3 hingga 4,5 mm).
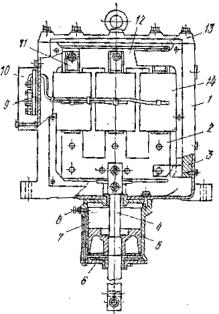
Beras. 1. Elektromagnet rem seri KMT: 1 — rumahan, 2 — jangkar, 3 — pemandu, 4 — batang, 5 — piston, 6 ~ penutup peredam, 7 — silinder peredam, 8 — sekrup penyesuaian kompresi, 9 — blok terminal, 10 — penutup blok terminal, 11 — pemegang koil kuningan, 12 — kuk, 13 — penutup, 14 — koil
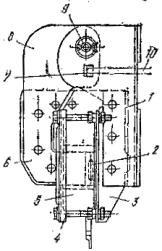
Beras. 2. Elektromagnet rem seri MO: 1 — kuk tetap, 2 — hubung singkat, 3 — persegi, 4 — penutup, 5 — koil, .6 — angker, 7 — strip, 8 — pipi, 9 — poros, 10 — dorong
Parameter utama elektromagnet rem dengan angker bergerak translasi (KMT, KMP, VM dan MP) adalah gaya traksi dan langkah angker, dan untuk elektromagnet katup seri MO, momen elektromagnet dan sudut rotasi angker.
Solenoida rem dari semua seri di atas bersifat independen peralatan listrikdiartikulasikan dengan rem.
Rem sepatu seri TS dengan elektromagnetik stroke pendek dan kapal rem pegas TKP (lihat Gbr. 3) dengan kumparan DC bawaan. Untuk rem ini, tuas 1 dibentuk bersama dengan rumahan solenoida dan angker solenoida dicetak dengan tuas.
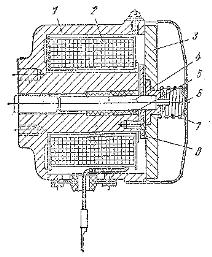
Beras. 3. Rem elektromagnet seri MP: 1 — bodi, 2 — koil, 3 — angker, 4 — pin, 5 — otolith dan busing ini, 6 — penutup, 7 — pegas redaman, 8 — tiang
Kumparan solenoida rem AC dihubungkan secara paralel dan dirancang untuk tegangan saluran penuh. Saat dihidupkan, terjadi kejutan arus yang signifikan: untuk elektromagnet seri KMT Azstart = (10-30) Aznumer, seri MO — Azstart = (5-6) AzNo.
Saat memilih perangkat pelindung seperti sekering, arus lonjakan harus dipertimbangkan. Arus awal ditentukan oleh rumus
Azstart = Cp / √3U
untuk elektromagnet tiga fase
Saya mulai = Sp / U
di mana, CNS — daya penuh pada saat penyalaan, VA, tegangan listrik, V.
Kumparan solenoida rem arus DC dapat berupa sambungan seri dan paralel (eksitasi).
 Elektromagnet dari koil koneksi seri bekerja cepat karena induktansi rendah dan dapat diandalkan dalam pengoperasian karena menyediakan pengereman, mekanisme untuk batuan di sirkuit angker motor listrik. Kerugiannya adalah kemungkinan pengereman yang salah dengan disinhibisi berikutnya pada beban yang sangat rendah, misalnya saat idle. Oleh karena itu, disarankan untuk menggunakannya untuk mekanisme derek dengan fluktuasi beban yang relatif kecil dan oleh karena itu besarnya arus jangkar, misalnya untuk mekanisme pergerakan derek.
Elektromagnet dari koil koneksi seri bekerja cepat karena induktansi rendah dan dapat diandalkan dalam pengoperasian karena menyediakan pengereman, mekanisme untuk batuan di sirkuit angker motor listrik. Kerugiannya adalah kemungkinan pengereman yang salah dengan disinhibisi berikutnya pada beban yang sangat rendah, misalnya saat idle. Oleh karena itu, disarankan untuk menggunakannya untuk mekanisme derek dengan fluktuasi beban yang relatif kecil dan oleh karena itu besarnya arus jangkar, misalnya untuk mekanisme pergerakan derek.
Nilai arus untuk mekanisme pengangkatan adalah sekitar 40% dari arus pengenal motor listrik, dan untuk mekanisme perjalanan - sekitar 60%.Oleh karena itu, besarnya gaya traksi atau torsi rem koil secara konsisten ditunjukkan dalam katalog untuk dua nilai arus koil: untuk 40 dan 60% dari nominal (masing-masing untuk mekanisme pengangkatan dan pergerakan).
Jika dalam proses menghidupkan motor listrik, nilai minimum arus yang mengalir melalui koil elektromagnet rem kurang dari 40 atau 60% dari nilai nominal, maka torsi pengereman perlu dikurangi ke nilai ditunjukkan untuk nilai arus 40 atau 60% dari nominal (dengan mengurangi gaya pegas rem atau berat rem).
 Elektromagnet rem DC dengan kumparan koneksi paralel tidak memiliki kelemahan di atas. Namun, karena induktansi kumparan yang signifikan, elektromagnet ini bersifat inersia. Selain itu, mereka kurang dapat diandalkan, karena ketika sirkuit angker motor listrik putus, belitan elektromagnet ini terus mengalir di sekitar arus, dan rem tetap tanpa rem.
Elektromagnet rem DC dengan kumparan koneksi paralel tidak memiliki kelemahan di atas. Namun, karena induktansi kumparan yang signifikan, elektromagnet ini bersifat inersia. Selain itu, mereka kurang dapat diandalkan, karena ketika sirkuit angker motor listrik putus, belitan elektromagnet ini terus mengalir di sekitar arus, dan rem tetap tanpa rem.
Kelemahan pertama dapat dihilangkan dengan memaksa, yang, secara seri dengan koil, termasuk hambatan ekonomis, yang selama pencabutan angker elektromagnetik, menggerakkan relai arus dengan kontak pembuka dan memasuki sirkuit listrik setelah angker elektromagnet ditarik, mengurangi arus dalam koil dan pemanasannya sesuai.
Kerugian kedua dihilangkan dengan menghubungkan koil relai arus secara seri dengan angker motor listrik dan menutupnya secara seri dengan rangkaian koil elektromagnet. Saat menggunakan pemaksaan, waktu pemaksaan tidak boleh lebih dari 0,3 — 0,6 detik.
Untuk memasok elektromagnet dengan arus searah dari jaringan arus bolak-balik, penyearah setengah gelombang standar dengan dioda untuk arus hingga 3 A dan sekelompok kapasitor dengan kapasitas 2 hingga 14 μF digunakan, yang menyediakan parameter keluaran yang sesuai dengan kondisi untuk belitan suplai elektromagnet.
Elektromagnet pengereman arus bolak-balik banyak digunakan untuk instalasi derek, tetapi praktik pekerjaan mereka telah menunjukkan bahwa mereka memiliki sejumlah kelemahan: ketahanan aus yang relatif rendah, arus perpindahan koil yang signifikan 7-30 kali lebih tinggi dari arus pengenalnya (dengan armatur yang ditarik sepenuhnya ), guncangan kuat saat pengereman dan pelepasan karena kurangnya pengaturan kelancaran proses pengereman, kerusakan kumparan akibat panas berlebih dengan pencabutan angker yang tidak lengkap.
 Kelemahan umum elektromagnet rem DC dan AC adalah ketidaksempurnaan karakteristik traksi: pada awal langkah angker, kembangkan gaya traksi terkecil, dan pada akhirnya - yang terbesar.
Kelemahan umum elektromagnet rem DC dan AC adalah ketidaksempurnaan karakteristik traksi: pada awal langkah angker, kembangkan gaya traksi terkecil, dan pada akhirnya - yang terbesar.
Dengan semua kelemahan ini, elektromagnet rem DC lebih andal dalam pengoperasiannya daripada elektromagnet AC. Oleh karena itu, untuk mengontrol rem mekanisme derek dengan peralatan listrik AC, elektromagnet rem DC yang ditenagai oleh penyearah semikonduktor sering dicoba.
Mempertimbangkan bahwa elektromagnet rem memiliki sejumlah kelemahan signifikan yang disebutkan di atas, saat ini banyak digunakan untuk menggerakkan rem derek. pendorong elektro-hidraulik langkah panjang.