Skema kontrol penggerak listrik dari berbagai lokasi
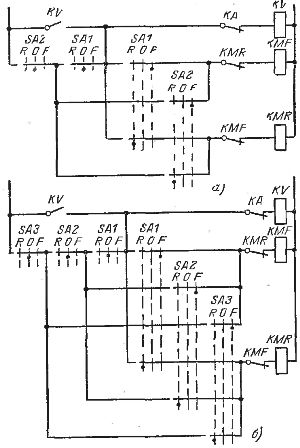
 Untuk jalur proses kontinu, di mana drive bekerja terutama dalam satu arah (maju) dan jarang terjadi pembalikan, disarankan untuk menggunakan sirkuit (Gbr. 1) dengan dimasukkannya kontaktor jalur untuk operasi "maju" melalui pemutus, dan untuk operasi "terbalik" — melalui kontak penggerak kontaktor KMR. Pengaturan ini mengurangi waktu untuk memulai perjalanan ke arah yang diinginkan.
Untuk jalur proses kontinu, di mana drive bekerja terutama dalam satu arah (maju) dan jarang terjadi pembalikan, disarankan untuk menggunakan sirkuit (Gbr. 1) dengan dimasukkannya kontaktor jalur untuk operasi "maju" melalui pemutus, dan untuk operasi "terbalik" — melalui kontak penggerak kontaktor KMR. Pengaturan ini mengurangi waktu untuk memulai perjalanan ke arah yang diinginkan.
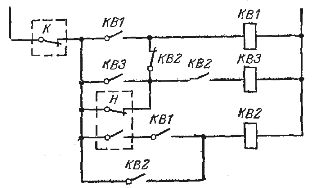
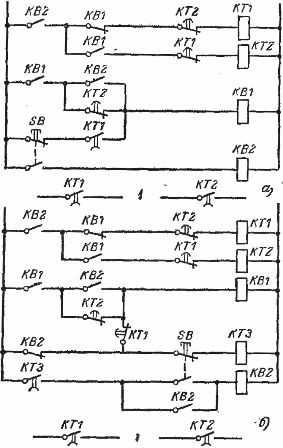
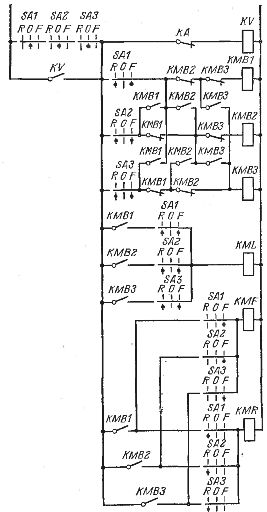
Diagram pada gambar. 2 memungkinkan kontrol motor listrik jarak jauh yang dapat dibalik dari objek yang bergerak. Sirkuit ini digunakan, misalnya, untuk mengontrol motor penutup sumur pemanas dari derek. Sirkuit sinyal dan penerimaan berbagai sinyal ditunjukkan pada Gambar. 3—9.
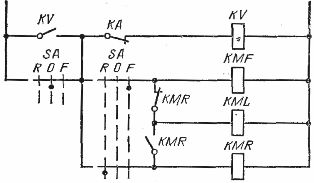
Beras. 1. Skema kontrol mesin belakang dengan "belakang" belakang yang langka.
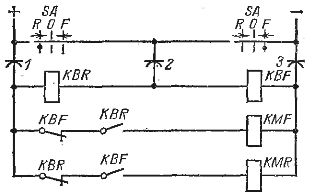
Beras. 2. Skema kontrol motor yang dapat dibalik melalui kontrol troll.
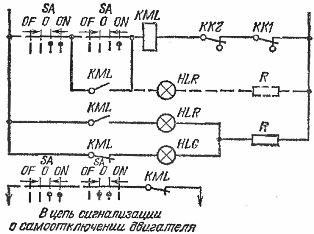
Beras. 3. Skema untuk menandakan status penggerak listrik yang tidak dapat diubah.
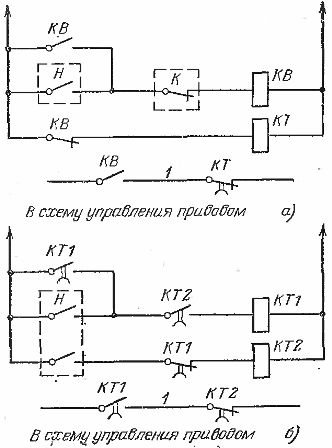
Beras. 4.Sirkuit untuk menerima sinyal dengan penundaan waktu setelah dimulainya paparan sinyal panjang (a) dan berdenyut (b): K - kontak pembuka kunci, 1 - kontak ke sirkuit kontrol drive.
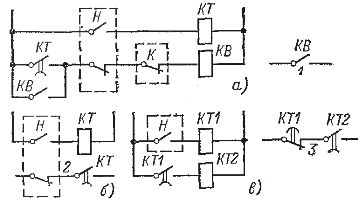
Beras. 5. Skema penerimaan sinyal setelah akhir ketukan (dari ekor) sinyal H panjang (a), pulsa (b), pulsa dengan waktu tunda (c). K — membuka kunci kontak, 1, 2, 3 — kontak ke sirkuit kontrol penggerak.
Beras. 6. Skema untuk menerima sinyal panjang setelah dimulainya H sekunder.
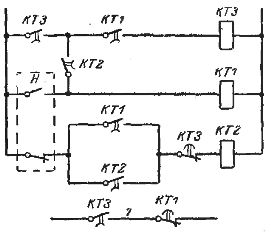
Beras. 7. Skema untuk menerima sinyal pulsa dengan penundaan waktu setelah aksi sekunder dari sinyal H (KT1 adalah 0,2-0,8 detik; KT2 0,3 detik; KTZ 0,5 detik). 1 — kontak ke sirkuit kontrol drive.
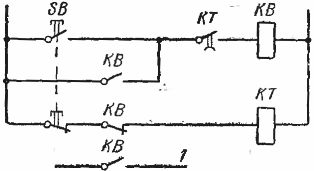
Beras. 8. Skema untuk menerima sinyal dengan durasi tertentu, terlepas dari durasi menekan tombol: 1 — hubungi sirkuit kontrol penggerak.
Skema penghitungan digunakan untuk memengaruhi drive secara otomatis setelah menghitung sejumlah operasi atau siklus tertentu. Mereka dapat menghitung penutupan dan bukaan (Gbr. 10), hanya penutupan (Gbr. 11), atau hanya bukaan (Gbr. 12).
Menghitung pulsa sesuai dengan skema yang ditunjukkan disuplai dari kontak relai foto, sakelar gerak, atau perangkat lain.
Dalam skema penghitungan yang ditunjukkan pada gambar. 10, relai REV850 digunakan dengan magnet "menempel" pada angker, dan oleh karena itu gangguan suplai tegangan ke sirkuit ini tidak mengganggu penghitungan. Di sirkuit penghitungan lainnya, ketika suplai tegangan terputus, ada kehilangan hitungan pulsa.
Untuk memeriksa validitas skema akun (Gbr. 11), tombol kontrol… Setiap kali Anda menekan tombol SB0N, sirkuit melakukan satu hitungan. Tombol SB0F digunakan untuk mengatur ulang penghitung.Tombol semacam itu juga dapat disediakan di skema lain.
Beras. 9. Sirkuit untuk menerima sinyal dalam dua sirkuit berbeda dengan menekan satu tombol berturut-turut: a — durasi sinyal sama dengan durasi menekan tombol, b — durasi sinyal tidak bergantung pada durasi menekan tombol , 1 — kontak ke sirkuit kontrol penggerak.
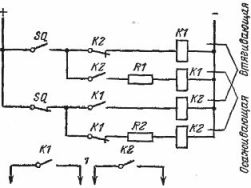
Beras. 10. Skema akun hingga dua.
Pulsa untuk setiap nomor adalah satu penutupan dan satu pembukaan kontak saklar batas SQ; 1 — kontak ke sirkuit kontrol drive.
Menghitung pulsa di sirkuit gbr. 11, 12 adalah penutupan jangka pendek (bukaan) dari kontak SQ, dan keadaan tertutup dari kontak ini harus cukup untuk menyalakan kontaktor impuls KNA dan satu relai KB (KL).
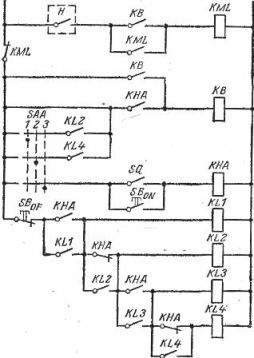
Beras. 11. Skema menghitung sampai tiga saat kontak SQ ditutup.
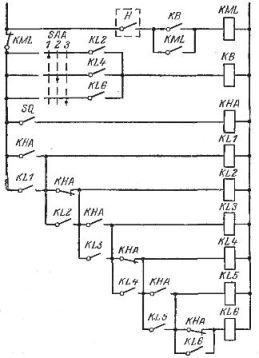
Beras. 12. Skema menghitung sampai tiga saat membuka kontak SQ
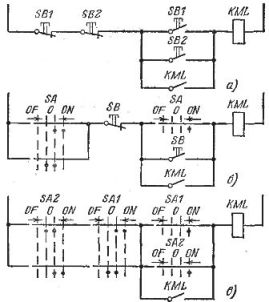
Beras.13. Skema kontrol mesin yang tidak dapat diubah dari dua tempat: a — dengan dua tombol, b — dengan satu tombol dan satu kunci, c — dengan dua tombol.
Beras. 14. Skema kontrol bolak-balik bergantung satu sisi dari penggerak listrik dari dua tempat.
Penghitungan diatur ulang oleh kontaktor jalur KML; waktu tutup kontaktor SQ harus kurang dari waktu aktif kontaktor KML.
Skema penghitungan untuk angka yang sedikit lebih besar dapat dibuat dengan analogi dengan skema di atas, tetapi ketika penghitungan lebih dari lima atau delapan, atau dalam kasus di mana kehilangan penghitungan saat tegangan menghilang tidak dapat diterima, disarankan untuk menggunakan nomor relay.
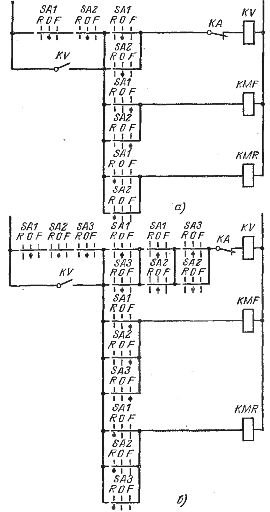
Beras. 15. Skema kontrol mesin reversibel yang bergantung: a — dari dua tempat, b — dari tiga tempat
Relai penghitung langkah motor tipe E-526 hingga 30 hitungan atau relai penghitung pulsa tipe E 531 dengan jumlah pulsa hingga 75 dapat digunakan.Relai beroperasi pada arus bolak-balik dan kontaknya mengaktifkan daya mati masing-masing pada 220 V AC dan DC 50 dan 30 watt.
Sirkuit kontrol motor listrik dari beberapa tempat dapat bergantung, bergantung satu arah, dan independen (Gbr. 13). Paling sering, skema kontrol dependen digunakan (Gbr. 15) sebagai yang paling sederhana. Menurut skema ini, saat mengoperasikan perangkat kontrol apa pun, memindahkan gagang perangkat lain dari nol ke posisi pengoperasian menyebabkan motor berhenti.
Menurut skema kontrol dependen satu arah dari dua (Gbr. 14) dan tiga (Gbr. 16), sakelar SA1 dapat dikontrol secara independen dari posisi sakelar SA2 (SA2 dan SA3). Kontrol sakelar SA2 dimungkinkan ketika sakelar SA1 berada di posisi nol dan tidak bergantung pada posisi sakelar SA3. Kontrol sakelar SA3 dimungkinkan saat sakelar SA1 dan SA2 berada di posisi nol.
Gambar 16. Skema kendali ketergantungan searah dari motor bolak-balik tiga tempat
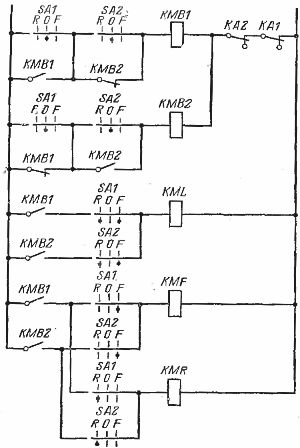
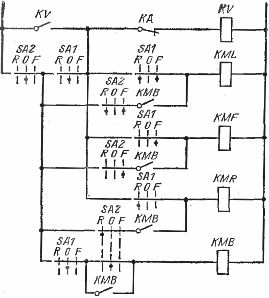
Beras. 17. Skema kontrol mesin yang dapat dibalik secara independen dari dua tempat.
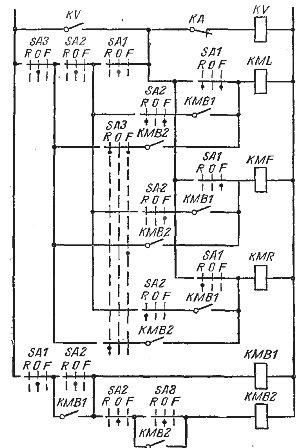
Beras. 18. Skema kontrol mesin yang dapat dibalik secara independen dari tiga tempat.
Dalam skema kontrol independen (Gbr. 17 dan 18), saat konverter dikendalikan oleh sakelar pertama mana pun (SA1, SA2, atau SA3), menggerakkan gagang sakelar lainnya tidak memengaruhi pengoperasian konverter. Setelah kembali ke posisi nol gagang kunci pertama, aktuator akan berhenti terlepas dari posisi gagang kunci kedua (atau dua lainnya). Awal baru hanya mungkin setelah mengembalikan kunci kedua (atau dua lainnya) ke posisi nol.
Sangat sering mereka menggunakan kontrol penggerak dari dua dan tiga tempat sesuai dengan skema yang disederhanakan (Gbr. 19); ini berarti kontrol preferensi hanya dari satu tempat pertama (kunci SA1). Saat konverter dikendalikan oleh sakelar lain (SA2 atau SA3), memindahkan gagang sakelar pertama dari posisi nol menyebabkan kontrol dipindahkan ke sakelar itu.
Beras. 19. Skema yang disederhanakan untuk mengendalikan penggerak listrik yang dapat dibalik: a — dari dua tempat, b — dari tiga tempat.