Amplifier magnetik pada mesin pemotong logam
Penguat magnet mengganti sirkuit listrik dengan mengubah hambatan listrik induktifnya dalam batas yang luas, yang nilainya bergantung pada tingkat saturasi sirkuit magnetik.
Amplifier magnetik banyak digunakan dalam penggerak listrik mesin pemotong logam pemotong logam karena keandalan dan masa pakai yang lama (ini dianggap sebagai salah satu elemen sistem otomasi yang paling andal), tidak adanya bagian yang bergerak, kemungkinan melakukan magnet amplifier dengan kekuatan pecahan watt hingga ratusan kilowatt, kekuatan tinggi dan daya tahan dalam hal getaran dan beban kejut. Selain itu, berkat amplifier magnetik, sinyal dapat dengan mudah dijumlahkan. Mereka memiliki keuntungan yang tinggi. Dalam amplifier magnetik, tidak ada sambungan listrik antara sirkuit input dan output.
Prinsip operasi penguat magnetik didasarkan pada penggunaan kurva magnetisasi nonlinier dari bahan feromagnetik.Saat dimagnetisasi DC, inti penguat jenuh dan induktansi kumparan AC operasi penguat berkurang. Gulungan operasi biasanya dihubungkan secara seri dengan beban. Oleh karena itu, tegangan yang diterapkan pada belitan operasi penguat pada saat jenuh sebelum inti jenuh diterapkan pada beban.
Arus beban dikendalikan dengan memvariasikan arus dalam kumparan bias penguat magnetik. Kumparan bias digunakan untuk membuat bias awal yang diperlukan untuk mengubah arus pada beban dengan cara yang berbeda tergantung pada tanda polaritas sinyal kontrol, serta untuk memilih titik pada bagian garis lurus dari karakteristik. Koil umpan balik dirancang untuk mendapatkan bentuk karakteristik keluaran yang diperlukan.
Secara struktural, penguat magnet adalah inti yang terbuat dari bahan feromagnetik lembaran tempat kumparan AC dan DC dililitkan. Untuk menghilangkan interferensi, mis. dll. c.Rangkaian AC dari kumparan DC Kumparan AC dililitkan secara terpisah pada inti dan kumparan DC menutupi kedua inti.
Skema penguat magnet paling sederhana
Penguat magnetik mungkin memiliki beberapa kumparan kontrol. Dalam hal ini, dalam mode operasi, arus pada beban akan ditentukan oleh arus kontrol total. Artinya, dapat digunakan sebagai penambah sinyal listrik yang tidak berhubungan (sinyal permanen dijumlahkan).
Amplifier magnetik dapat berupa pembalik dan pembalik. Dalam penguat magnetik ireversibel, perubahan polaritas sinyal kontrol tidak menyebabkan perubahan fase dan tanda arus beban.
Inti penguat magnet terbuat dari baja transformator dan permaloid, dan baja transformator digunakan bila daya penguat magnet lebih besar dari 1 W. Besarnya induksi magnet pada inti baja transformator mencapai 0,8 — 1 . 0 T. Faktor penguatan penguat magnetik tersebut bervariasi dari 10 hingga 1000.
Permalloy digunakan pada penguat magnetik yang dayanya kurang dari 1 V. Berkarakter persegi panjang loop histeresis untuk permaloy memungkinkan untuk mendapatkan keuntungan dari 1000 hingga 10.000 dan lebih banyak lagi.
Inti penguat magnetik dimuat dari pelat terpisah, seperti inti choke atau transformator Penguat magnetik berdasarkan inti toroidal telah mendapatkan distribusi yang luas, yang, meskipun mengalami kesulitan teknologi dalam produksinya, memiliki sejumlah keunggulan, yang pertama di antaranya adalah tidak adanya celah udara , yang meningkatkan karakteristik penguat magnetik.
Skema penguat magnetik berikut tersebar luas: tunggal dan dorong, reversibel dan ireversibel, fase tunggal dan multifase.
Dalam mesin pemotong logam (dan tidak hanya pemotong logam), Anda dapat menemukan berbagai macam desain amplifier magnetik: seri UM-1P fase tunggal, seri UM-ZP tiga fase yang dirangkai pada enam inti berbentuk U yang dibuat dari baja E310, seri TUM fase tunggal pada inti toroidal, blok amplifier magnetik seri BD, yang berisi, selain amplifier magnetik, transformator step-down, dioda, dan resistor yang dipasang pada satu panel. Sistem penggerak listrik dapat dibangun di atas amplifier apa pun di seri ini.
Sirkuit berliku penguat magnet UM-1P
Selain itu, penggerak lengkap dengan penguat magnetik dan motor DC sering digunakan pada berbagai mesin pemotong logam, misalnya penggerak yang sangat umum dengan penguat magnetik PMU. Tapi kita pasti akan membicarakannya lain kali. Selain itu, pada posting berikutnya kami akan fokus pada metode penyetelan amplifier magnetik dan menyentuh sejumlah masalah lain yang menarik bagi siapa saja yang terus-menerus ditemui atau akan ditemui di masa mendatang saat bekerja dengan amplifier magnetik.
Penggerak listrik penuh dengan amplifier magnetik
Terlepas dari kenyataan bahwa konverter statis (thyristor, transistor daya, modul IGBT), di pabrik industri kami masih sangat umum untuk melihat motor listrik dan generator DC bekerja dalam kombinasi dengan amplifier magnetik.
Amplifier magnetik paling banyak digunakan dalam peralatan industri pada 1950-an. Secara umum, di era teknologi semikonduktor, ada tren berikut - penggerak asinkron dan sinkron (untuk daya tinggi) digunakan dalam penggerak listrik yang tidak diatur dan perangkat DC dengan listrik atau statis (penyearah tirotron atau merkuri, penguat magnet) untuk dikendalikan.
Saat ini, paling sering di perusahaan domestik dalam skema peralatan listrik mesin pemotong logam, mesin dan instalasi, dimungkinkan untuk menemukan penggerak listrik arus searah lengkap dengan amplifier magnetik dari seri PMU.
PMU — drive dengan penguat magnetik dan penyearah selenium. Kisaran penyesuaian kecepatan motor adalah 10: 1. Penyesuaian dilakukan dengan mengubah tegangan jangkar dari kecepatan motor pengenal.Sistem kontrol otomatis dengan umpan balik elektronik. d s. mesin, tanpa tachogenerator dan amplifier perantara. Dorong daya dari 0,1 hingga 2 kW. Penggerak dirancang untuk tegangan keluaran jembatan yang diperbaiki dari 340 hingga 380 V. Untuk mendapatkan karakteristik penggerak yang cukup kaku, umpan balik arus dan tegangan negatif dimasukkan ke dalam sirkuit.
Setiap drive seri PMU adalah satu set yang terdiri dari unit catu daya, penyearah, penguat magnetik, motor DC, dan pengontrol kecepatan.
Drive berfungsi sebagai berikut. Tegangan yang diterapkan ke motor secara otomatis mengikuti sinyal tergantung pada perubahan kecepatannya. Saat kecepatan mesin menurun, voltase meningkat dan sebaliknya: voltase mempertahankan nilai kecepatan dengan akurasi tertentu, terlepas dari perubahan beban dan faktor gangguan lainnya.
Pengaruh berbagai faktor yang mengganggu pada kecepatan rotasi mengkompensasi reaktivitas kumparan kerja penguat magnet: dengan meningkatnya beban, arus dalam jangkar meningkat, yang menyebabkan penurunan resistansi kumparan kerja dari penguat magnet. Karena penurunan resistansi kumparan kerja, tegangan pada angker motor meningkat, arus pada belitan meningkat, yang selanjutnya mengurangi impedansi belitan penguat kerja.Akibat penurunan resistansi secara umum dari koil yang bekerja, tegangan pada angker motor meningkat , yang mengkompensasi penurunan kecepatan engine. Kecepatan motor yang dibutuhkan diatur menggunakan titik setel P dan resistor R1 — R4.
PMU-M mirip dengan seri PMU, tetapi penguat magnetnya dipasang pada inti berbentuk U. Dorong daya PMU-M dari 0,1 menjadi 7 kW.
perangkat PMU-M
Penggerak seri PMU-M menggunakan sistem kontrol kecepatan otomatis dengan voltase angker motor dan umpan balik arus. Penguat magnetik memiliki dua set kumparan kontrol. Arus kontrol mengalir melalui salah satunya, yang merupakan jumlah aljabar dari arus setpoint dan arus umpan balik, dan yang lainnya (kumparan bias) berfungsi untuk memilih titik operasi dari bagian lurus dari karakteristik penguat magnet.
Untuk melindungi dari nilai arus jangkar yang terlalu tinggi, drive PMU-M ukuran 8 hingga 11 dilengkapi dengan pembatas arus. Ketika arus angker melebihi nilai yang diizinkan, relai arus lebih diaktifkan, kontak terbukanya terbuka dan memutus sirkuit suplai koil kontrol. Karena kumparan bias tetap tertutup, penguat magnet tidak diberi energi dan arus jangkar berkurang. Pengoperasian sirkuit penggerak PMU-M serupa dengan pengoperasian sirkuit penggerak PMU.
PMU -P — drive dengan akurasi yang ditingkatkan dan jangkauan kontrol yang diperluas 100: 1. Sistem kontrol otomatis dengan umpan balik untuk frekuensi rotasi, yang dilakukan menggunakan tachogenerator dan penguat semikonduktor perantara. Kecepatan motor diatur dengan memvariasikan tegangan jangkar.
Omong-omong, amplifier magnetik juga dapat digunakan untuk mengatur tegangan pada terminal motor asinkron, serta starter nirkontak.
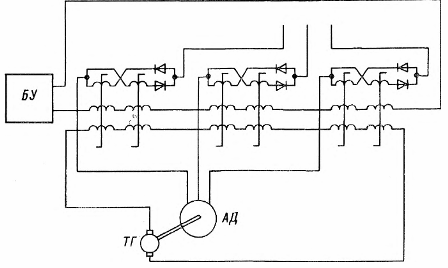
Sistem motor penguat-induksi magnetik