Perangkat kontrol kecepatan mesin
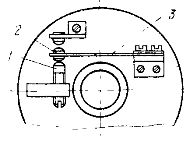
Motor listrik asinkron banyak digunakan di sirkuit rem arus balik. relai kontrol kecepatan induksi... Poros input relai 5, tempat magnet permanen silinder 4 dipasang, dihubungkan ke poros motor listrik, yang kecepatan sudutnya akan dikontrol.
Ketika motor listrik berputar, medan magnet melintasi kabel hubung singkat 3 stator putar 6. EMF diinduksi dalam belitan, yang nilainya sebanding dengan kecepatan sudut putaran poros. Di bawah pengaruhnya, arus muncul di koil dan gaya interaksi muncul, yang cenderung memutar stator 6 ke arah rotasi magnet.
Pada kecepatan rotasi tertentu, gaya meningkat sedemikian rupa sehingga pembatas 2, mengatasi hambatan pegas datar, mengganti kontak relai. Relai dilengkapi dengan dua node kontak: 1 dan 7, yang dialihkan tergantung pada arah putaran.
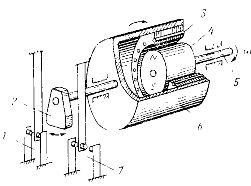
Gambar 1. Relai kontrol kecepatan induktif
Relai kontrol kecepatan induksi memiliki desain yang agak rumit dan akurasi rendah yang hanya dapat diterima untuk sistem kontrol kasar. Keakuratan pengaturan kecepatan yang lebih tinggi dapat dicapai dengan menggunakan tachogenerator - mesin mikro pengukur, tegangan pada terminalnya berbanding lurus dengan kecepatan putaran.
Generator Tacho digunakan dalam sistem umpan balik penggerak kecepatan variabel dengan kisaran rpm yang lebar dan oleh karena itu memiliki kesalahan hanya beberapa persen. Yang paling umum adalah tachogenerator DC.
Dalam gambar. 2 menunjukkan diagram relai kontrol kecepatan untuk motor listrik M menggunakan tachogenerator G, sirkuit angker yang mencakup relai elektromagnetik K dan rheostat pengatur R. Ketika tegangan pada terminal angker tachogenerator melebihi tegangan operasi, relai dihidupkan di sirkuit eksternal.
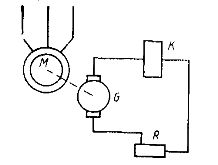
Gambar 2. Relai kontrol kecepatan dengan tachogenerator
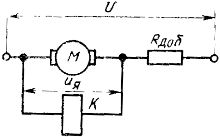
 Gambar 3. Skema jembatan tachometer
Gambar 3. Skema jembatan tachometer
Saat resistansi rangkaian angker meningkat, keakuratan rangkaian meningkat. Oleh karena itu, terkadang relai dihubungkan ke tachogenerator melalui penguat semikonduktor perantara. Dimungkinkan juga untuk menggunakan elemen ambang non-kontak semikonduktor dengan tegangan respons yang stabil untuk tujuan ini.
Keandalan sirkuit dapat ditingkatkan jika tachogenerator DC diganti dengan tachogenerator asinkron tanpa kontak.
Tachogenerator asinkron memiliki rotor berongga non-magnetik yang dibuat dalam bentuk kaca. Stator memiliki dua belitan dengan sudut 90 ° satu sama lain. Salah satu kumparan terhubung ke jaringan arus bolak-balik.Tegangan sinusoidal dilepas dari belitan lain, yang sebanding dengan kecepatan rotor. Frekuensi tegangan keluaran selalu sama dengan frekuensi listrik.
 Pada motor Eksekutif DC modern, tachogenerator dibangun di rumah yang sama dengan mesin dan dipasang pada poros yang sama dengan motor utama. Ini mengurangi riak tegangan output dan meningkatkan akurasi pengaturan kecepatan.
Pada motor Eksekutif DC modern, tachogenerator dibangun di rumah yang sama dengan mesin dan dipasang pada poros yang sama dengan motor utama. Ini mengurangi riak tegangan output dan meningkatkan akurasi pengaturan kecepatan.
Tachogenerator DC tipe PT-1 dengan eksitasi elektromagnetik biasanya digunakan pada motor listrik seri PBST. Torsi tinggi motor DC Saya memiliki tacho magnet permanen bawaan.
Dalam kasus di mana motor DC M tidak memiliki tachogenerator, kecepatannya dapat dikontrol dengan mengukur EMF jangkar. Untuk ini, rangkaian jembatan tachometrik digunakan, yang dibentuk oleh dua resistor: R1 dan R2, angker Ri dan tiang tambahan dari mesin Rdp. Tegangan keluaran tachometer bridge Uout = U1 — Udp, atau
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
Persamaan terakhir berlaku dengan syarat fluks magnet motor listrik konstan. Menyertakan elemen ambang batas pada keluaran jembatan tachometrik, diperoleh relai yang disetel ke kecepatan putaran sudut tertentu. Keakuratan jembatan tachometer rendah karena variabilitas resistansi kontak sikat dan ketidakseimbangan pemanasan resistansi.
Jika motor DC beroperasi pada karakteristik buatan dan resistansi tambahan yang besar dimasukkan ke dalam armature, fungsi relai kecepatan dapat dilakukan oleh relai tegangan yang dihubungkan ke terminal armatur.
Tegangan pada armature motor listrik Uja = E + IjaRja.
Karena I = (U — E) / (Ri + Rext), diperoleh Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, maka suku kedua dapat diabaikan dan tegangan terminal jangkar dapat dianggap berbanding lurus dengan ggl dan kecepatan putaran motor.
Gambar 4. Kontrol kecepatan dengan relai tegangan
 Gambar 5. Relai kontrol kecepatan sentrifugal
Gambar 5. Relai kontrol kecepatan sentrifugal
Mereka memiliki desain yang sangat sederhana. sakelar kecepatan sentrifugal... Dasar relai adalah pelat muka plastik 4, dipasang pada poros, yang kecepatan putarannya harus dikontrol. Pegas datar 3 dengan kontak bergerak masif 2 dan kontak tetap yang dapat disesuaikan 1 dipasang di pelat depan Pegas terbuat dari baja khusus, modulus elastisitasnya praktis tidak tergantung pada perubahan suhu.
Ketika pelat muka berputar, gaya sentrifugal bekerja pada kontak yang dapat digerakkan, yang pada kecepatan rotasi tertentu mengatasi hambatan pegas datar dan mengganti kontak. Arus dialirkan ke perangkat kontak melalui cincin selip dan sikat, tidak ditunjukkan pada gambar. Relai semacam itu digunakan dalam sistem stabilisasi kecepatan untuk motor mikro DC. Terlepas dari kesederhanaannya, sistem mempertahankan kecepatan dengan kesalahan sekitar 2%.
