Kontrol motor sebagai fungsi arus
 Kontrol motor dapat dilakukan tergantung pada kekuatan arus stator. Rangkaian pengasutan sebagai fungsi arus motor induksi rotor belitan ditunjukkan pada Gambar. 1 a.
Kontrol motor dapat dilakukan tergantung pada kekuatan arus stator. Rangkaian pengasutan sebagai fungsi arus motor induksi rotor belitan ditunjukkan pada Gambar. 1 a.
Pada saat start, arus mencapai nilai I1, dan setelah selang waktu tertentu berkurang menjadi nilai I2 (gbr. b). Pada titik ini, bagian dari resistansi start di sirkuit rotor secara otomatis dihubung pendek, arus naik ke nilai I1, kemudian turun lagi ke nilai I2, yang menyebabkan bagian lain dari resistansi start menjadi pendek. Proses ini diulangi hingga semua tahap resistansi awal dihubung pendek. Untuk tujuan ini, relai arus lebih digunakan, yang belitannya termasuk dalam rangkaian daya motor.
Saat Anda mengklik tombol Mulai SB1 (lihat gbr. A) kontaktor KM diaktifkan, kontak utamanya menghubungkan motor ke jaringan pada resistansi awal yang sama di sirkuit rotor. Dalam hal ini, koil relai KA menerima daya, kontak bukaannya ada di sirkuit koil akselerator K1.Relai KA diatur sedemikian rupa sehingga waktu respon lebih singkat dibandingkan dengan kontaktor K1. Selain itu, kontak putusnya pada nilai maksimum yang diizinkan mulai saat ini terbuka, dan ketika arus berkurang ke nilai pensakelarannya, mereka menutup lagi, yang dengannya koil K1 dihidupkan melalui kontak relai KA pada saat korsleting tahap resistansi awal.
Relai KA akan beroperasi sebelum kontaktor akselerasi K1 diberi energi, dan motor akan berakselerasi saat resistansi start dimasukkan sepenuhnya. Saat arus sakelar awal berkurang, kontak relai KA akan menutup dan koil K1 akan menyala. Pada saat yang sama, kontak K1 menutup, memberikan daya sendiri pada koil secara independen dari relai KA, dan kontak di sirkuit kontrol terbuka, mencegah inklusi dini dari akselerator K2.
Karena kontak suplai K1 adalah bagian dari hubung singkat dari resistansi awal, arus stator meningkat ke nilai maksimum dan relai KA, saat dipicu, membuka kontaknya di sirkuit suplai koil K2. Ketika motor mencapai kecepatan yang cukup dan arus stator turun kembali ke arus switching, kontak relai KA akan menutup dan menghidupkan koil K2, yang membuat hubung singkat tahap kedua dari resistansi awal ke kontaknya.
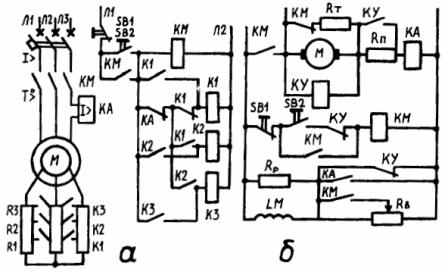
Beras. 1. Sirkuit kontrol tergantung pada arus: a — motor asinkron dengan rotor fase; b — Motor DC dengan eksitasi paralel
Dalam hal ini, arus stator meningkat lagi, relai KA akan beroperasi dan membuka kontaknya. Coil K2 tidak akan kehilangan daya karena akan memiliki waktu untuk menutup dengan kontak bantu K2.Penurunan arus stator lebih lanjut setelah akselerasi berikutnya akan menyebabkan belitan K3 menyala dan melakukan hubungan pendek pada tahap terakhir dari resistansi awal. Menekan tombol SB menghentikan motor dan sirkuit siap untuk start berikutnya. Menggunakan relai arus yang dikonfigurasi untuk kembali pada arus 12, berbagai penggerak listrik dapat dihentikan dan dibalik. Kerugian dari sirkuit kontrol dalam fungsi saat ini adalah jumlah kontak yang agak besar.
Untuk kontrol ireversibel dari motor DC paralel-bersemangat beberapa kilowatt, satu tahap rheostat awal dapat digunakan (lihat Gambar C). Diagram menunjukkan: mengatur resistansi RB di sirkuit eksitasi; resistansi pelepasan Rp terhubung secara paralel dengan kumparan eksitasi LM; resistansi pengereman RT yang terhubung secara paralel ke angker M ketika terputus dari jaringan dan RP resistansi awal yang terhubung secara seri ke sirkuit angker selama periode awal. Untuk menghasilkan fluks maksimum saat start-up, kumparan medan LM pada posisi awal dihidupkan pada tegangan penuh.
Ketika tombol SB2 ditekan, jangkar motor dari kontaktor saluran KM dihubungkan secara seri ke jaringan dengan resistansi RP. Relai kontrol starter SC beroperasi sebagai fungsi dari arus jangkar. Saat arus meningkat, kontak penutup KA memanipulasi resistansi RB, meningkatkan fluks magnet eksitasi, dan saat arus berkurang, kontak KA terbuka dan kumparan LM dihubungkan secara seri dengan resistansi rheostat RB, karena yang arus magnetnya berkurang.
Saat motor dihidupkan, arus angker awal yang meningkat menghidupkan relai KA dan koil LM menghasilkan fluks maksimum. Ketika kecepatan tertentu tercapai, kontaktor akselerasi K dihidupkan, resistansi awal RP dihubung pendek, setelah itu motor beroperasi sesuai dengan karakteristik aslinya. Ketika arus jangkar berkurang (akibat percepatan motor) sebelum relai KA berenergi, kontak KA pada rangkaian eksitasi akan terbuka.
Gulungan LM akan menyala secara seri dengan resistansi RB, menyebabkan fluks medan melemah dan arus jangkar meningkat. Relai KA akan beroperasi kembali, meningkatkan fluks dan sekaligus meningkatkan kecepatan motor. Selama pengaktifan, relai pesawat ruang angkasa dipicu beberapa kali hingga motor mencapai kecepatan yang diatur oleh rheostat kontrol RB. Perangkat bergetar seperti itu yang beroperasi sebagai fungsi arus menyederhanakan sirkuit dibandingkan dengan sirkuit kontrol sebagai fungsi waktu.
Saat motor dihidupkan dengan menekan tombol SB1, armature dihidupkan dari kontak pembuka KM ke resistor pengereman RT dan pengereman dinamis dilakukan secara otomatis. Pada awal penghentian, medan magnet sedikit melemah karena pembukaan kontak KM pada penggeser rheostat pengatur, dan arus eksitasi melewati seluruh resistansi RB. Saat kecepatan motor semakin menurun, kontaktor akselerasi K dinonaktifkan dan fluks meningkat saat koil eksitasi dinyalakan ke tegangan saluran penuh melalui kontak bukaan K, menghasilkan peningkatan torsi pengereman.