Skema tipikal untuk memulai motor listrik sinkron
Motor sinkron banyak digunakan di industri untuk penggerak listrik yang beroperasi pada kecepatan konstan (kompresor, pompa, dll.). Baru-baru ini, karena munculnya teknologi semikonduktor switching, penggerak listrik sinkron terkontrol telah dikembangkan.
Kelebihan motor sinkron
Motor sinkron sedikit lebih rumit daripada motor asinkron, tetapi memiliki sejumlah keunggulan, yang memungkinkan untuk digunakan dalam beberapa kasus daripada asinkron.
1. Keuntungan utama dari motor listrik sinkron adalah kemampuan untuk mendapatkan mode energi reaktif yang optimal, yang dilakukan dengan mengatur arus eksitasi motor secara otomatis. Motor sinkron dapat beroperasi tanpa mengkonsumsi atau menyuplai energi reaktif ke jaringan, dengan faktor daya (cos fi) sama dengan satu. Jika perusahaan perlu menghasilkan daya reaktif, maka motor sinkron yang beroperasi dengan eksitasi berlebih dapat mengalirkannya ke jaringan.
2.Motor sinkron kurang sensitif terhadap fluktuasi tegangan listrik daripada motor asinkron. Torsi maksimumnya sebanding dengan tegangan saluran, sedangkan torsi kritis motor induksi sebanding dengan kuadrat tegangan.
3. Motor sinkron memiliki kapasitas kelebihan beban yang tinggi. Selain itu, kapasitas kelebihan motor sinkron dapat ditingkatkan secara otomatis dengan meningkatkan arus eksitasi, misalnya, dalam kasus peningkatan beban jangka pendek yang tiba-tiba pada poros motor.
4. Kecepatan putaran motor sinkron tetap tidak berubah untuk setiap beban poros dalam kapasitas kelebihannya.
Metode memulai motor sinkron
Metode berikut untuk menghidupkan motor sinkron dimungkinkan: start asinkron pada tegangan saluran penuh dan start pada tegangan rendah melalui reaktor atau autotransformer.
Start motor sinkron dilakukan sebagai start asinkron. Torsi awal internal mesin sinkron kecil, sedangkan mesin kutub implisit adalah nol. Untuk membuat torsi asinkron, rotor dilengkapi dengan sangkar awal sangkar-tupai, yang jerujinya dimasukkan ke dalam slot sistem kutub. (Tentu saja, tidak ada batang di antara kutub pada motor kutub menonjol.) Sel yang sama berkontribusi untuk meningkatkan stabilitas dinamis motor selama lonjakan beban.
Karena torsi asinkron, motor mulai dan berakselerasi. Tidak ada arus eksitasi pada belitan rotor selama akselerasi.Mesin dihidupkan tanpa tereksitasi, karena keberadaan kutub tereksitasi akan mempersulit proses akselerasi, menghasilkan torsi pengereman yang serupa dengan motor induksi selama pengereman dinamis.
Ketika yang disebut Kecepatan subsinkron, yang berbeda dari sinkron sebesar 3 - 5%, arus disuplai ke koil eksitasi dan motor, setelah beberapa osilasi di sekitar posisi kesetimbangan, tertarik ke sinkronisasi. Motor kutub terbuka, karena torsi reaktif pada torsi poros rendah, kadang-kadang dibawa ke sinkronisasi tanpa memasok arus ke kumparan medan.
Pada motor sinkron, sulit untuk secara bersamaan memberikan nilai yang diperlukan dari torsi awal dan torsi input, yang dipahami sebagai torsi asinkron yang dikembangkan saat kecepatan mencapai 95% dari kecepatan sinkron. Sesuai dengan sifat ketergantungan torsi statis pada kecepatan, yaitu. sesuai dengan jenis mekanisme yang dirancang motor, parameter sel awal harus diubah di pabrik pembuatan mesin listrik.
Kadang-kadang, untuk membatasi arus saat memulai motor yang kuat, tegangan pada terminal stator dikurangi, termasuk belitan autotransformer atau resistor secara seri. Perlu diingat bahwa ketika motor sinkron dihidupkan, rangkaian belitan eksitasi ditutup dengan resistansi besar, melebihi resistansi belitan itu sendiri sebanyak 5-10 kali.
Jika tidak, di bawah aksi arus yang diinduksi dalam belitan selama penyalaan, terjadi fluks magnet yang berdenyut, komponen kebalikannya, berinteraksi dengan arus stator, menciptakan torsi pengereman.Torsi ini mencapai nilai maksimumnya pada kecepatan sedikit di atas setengah nominal, dan di bawah pengaruhnya, mesin dapat menghentikan akselerasi pada kecepatan ini. Membiarkan sirkuit medan terbuka selama pengasutan berbahaya karena insulasi belitan dapat rusak oleh EMF yang diinduksi di dalamnya.
Filmstrip Pendidikan - "Motor Sinkron" diproduksi oleh Pabrik Bahan Pendidikan pada tahun 1966. Anda dapat menontonnya di sini: Filmstrip «Synchronous Motor»

Start asinkron dari motor listrik sinkron
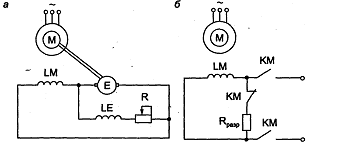
Rangkaian eksitasi motor sinkron dengan exciter yang terhubung secara membabi buta cukup sederhana dan dapat digunakan jika arus lonjakan tidak menyebabkan penurunan tegangan pada jaringan lebih dari torsi yang diizinkan dan statistik Ms <0,4 Mnom.
Awal asinkron dari motor sinkron dilakukan dengan menghubungkan stator ke jaringan. Motor dipercepat sebagai motor induksi ke kecepatan rotasi mendekati sinkron.
Dalam proses pengasutan asinkron, belitan eksitasi ditutup ke tahanan pelepasan untuk menghindari penghancuran belitan eksitasi selama penyalaan, karena pada kecepatan rotor rendah, tegangan berlebih yang signifikan dapat terjadi di dalamnya. Pada kecepatan rotasi yang mendekati sinkron, kontaktor KM dipicu (sirkuit suplai kontaktor tidak ditunjukkan dalam diagram), koil eksitasi terputus dari resistansi pelepasan dan dihubungkan ke angker penguat. Awal berakhir.
 Unit Khas Sirkuit Eksitasi Motor Sinkron Menggunakan Thyristor Exciters untuk Memulai Motor Sinkron
Unit Khas Sirkuit Eksitasi Motor Sinkron Menggunakan Thyristor Exciters untuk Memulai Motor Sinkron
Kelemahan sebagian besar penggerak listrik dengan motor sinkron, yang sangat mempersulit pengoperasian dan meningkatkan biaya, telah menjadi pemicu mesin listrik selama bertahun-tahun. Saat ini mereka banyak digunakan untuk menggairahkan motor sinkron. pembangkit thyristor… Mereka disediakan sebagai satu set.
Pemicu thyristor dari motor listrik sinkron lebih andal dan memiliki efisiensi lebih tinggi. dibandingkan dengan exciter mesin listrik. Dengan bantuan mereka, pertanyaan tentang pengaturan arus eksitasi yang optimal untuk mempertahankan keteguhan dapat dengan mudah diselesaikan. cos phi, tegangan busbar tempat motor sinkron disuplai, serta membatasi arus rotor dan stator motor sinkron dalam mode darurat.
Exciter thyristor dilengkapi dengan motor listrik sinkron paling besar yang diproduksi. Mereka biasanya melakukan fungsi-fungsi berikut:
- memulai motor sinkron dengan resistor awal yang termasuk dalam rangkaian belitan medan,
- shutdown tanpa kontak dari resistor awal setelah akhir start motor sinkron dan perlindungannya dari panas berlebih,
- pasokan eksitasi otomatis pada saat yang tepat untuk memulai motor listrik sinkron,
- penyesuaian arus eksitasi otomatis dan manual
- eksitasi paksa yang diperlukan jika terjadi penurunan tegangan dalam pada stator dan beban tajam melompat pada poros motor sinkron,
- pemadaman cepat medan motor sinkron bila diperlukan untuk mengurangi arus medan dan mematikan motor listrik,
- perlindungan rotor motor sinkron terhadap arus berlebih dan hubung singkat yang terus-menerus.
Jika motor listrik sinkron dihidupkan pada tegangan rendah, maka pada start "ringan", ia dieksitasi sampai belitan stator menyala pada tegangan penuh, dan pada start "berat", eksitasi disuplai pada tegangan penuh di sirkuit stator. Dimungkinkan untuk menghubungkan belitan medan motor ke armature exciter secara seri dengan resistansi pelepasan.
Proses memasok eksitasi ke motor sinkron diotomatiskan dalam dua cara: sebagai fungsi kecepatan dan sebagai fungsi arus.
Sistem eksitasi dan perangkat kontrol untuk motor sinkron harus menyediakan:
- menghidupkan, menyinkronkan, dan menghentikan mesin (dengan eksitasi otomatis di akhir start);
- eksitasi paksa dengan faktor tidak kurang dari 1,4 ketika tegangan listrik turun menjadi 0,8Un;
- kemungkinan kompensasi oleh mesin daya reaktif yang dikonsumsi (diberikan) oleh penerima listrik yang berdekatan dalam kemampuan termal mesin;
- menghentikan mesin jika terjadi kegagalan pada sistem eksitasi;
- stabilisasi arus eksitasi dengan akurasi 5% dari nilai yang ditetapkan saat tegangan listrik berubah dari 0,8 menjadi 1,1;
- regulasi eksitasi dengan deviasi tegangan stator dengan zona mati 8%;
- ketika tegangan suplai stator motor sinkron berubah dari 8 menjadi 20%, arus berubah dari nilai yang ditetapkan menjadi 1,4 In, meningkatkan arus eksitasi untuk memastikan kelebihan beban motor maksimum.
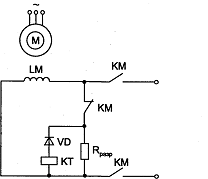
Pada diagram yang ditunjukkan pada gambar, eksitasi disuplai ke motor sinkron menggunakan relai elektromagnetik DC KT (Sleeving Time Relay).Kumparan relai terhubung ke tahanan pelepasan Rdisc melalui dioda VD. Ketika belitan stator dihubungkan ke sumber listrik, ggl diinduksi pada belitan eksitasi motor. Arus searah mengalir melalui koil relai KT, amplitudo dan frekuensi pulsa yang bergantung pada slip.
 Pasokan eksitasi ke motor sinkron tergantung pada kecepatannya
Pasokan eksitasi ke motor sinkron tergantung pada kecepatannya
Saat start-up, selip S = 1. Saat motor berakselerasi, motor berkurang dan interval antara setengah gelombang yang dikoreksi dari arus meningkat; fluks magnet secara bertahap berkurang di sepanjang kurva Ф (t).
Pada kecepatan yang mendekati sinkron, fluks magnet relai berhasil mencapai nilai fluks dropout relai Fot pada saat arus tidak melewati relai KT. Relai kehilangan daya dan melalui kontaknya menciptakan rangkaian daya kontaktor KM (rangkaian daya kontaktor KM tidak ditunjukkan dalam diagram).
Pertimbangkan kontrol catu daya dalam fungsi saat ini menggunakan relai arus. Dengan arus start, KA relai arus diaktifkan dan membuka kontaknya di rangkaian kontaktor KM2.
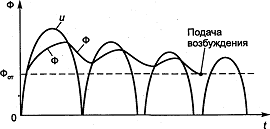
Grafik perubahan arus dan fluks magnet pada time relay KT
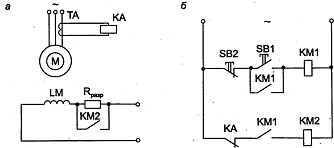 Memantau eksitasi motor sinkron sebagai fungsi arus
Memantau eksitasi motor sinkron sebagai fungsi arus
Pada kecepatan yang mendekati sinkron, relai KA menghilang dan menutup kontaknya di sirkuit kontaktor KM2. Kontaktor KM2 aktif, menutup kontaknya di sirkuit eksitasi mesin dan mem-shunt resistor Rres.
Lihat juga: Pemilihan peralatan untuk memulai motor sinkron